V
主页
3D重建革命!零预训练10倍 速度360°重建新方法 ZeroRF
发布人
3D重建革命!零预训练10倍速度360°重建新方法 ZeroRF! 在「3D视觉工坊」微信公众号回复:「原论文」,获取论文代码和链接,快学起来! ZeroRF是一种针对神经场表示中稀疏视角360°重建挑战的全新场景优化方法。目前的突破,如神经辐射场(NeRF),已经展示了高保真图像合成,但在稀疏输入视角方面存在困难。现有方法,如通用化NeRF和基于场景的优化方法,在数据依赖性、计算成本和跨多样化场景的泛化方面存在限制。为了克服这些挑战,我们提出了ZeroRF,其关键思想是将定制的深度图像先验集成到分解的NeRF表示中。与传统方法不同,ZeroRF使用神经网络生成器对特征网格进行参数化,实现了高效的稀疏视角360°重建,无需预训练或额外正则化。广泛的实验展示了ZeroRF在质量和速度方面的多样性和优越性,在基准数据集上取得了最先进的结果。@3D视觉工坊@计算机视觉工坊@3DCV
打开封面
下载高清视频
观看高清视频
视频下载器
3DGS进化,高效高质量的GaussianPro来袭!
清华最新开源万能3D分割一切!
ECCV'24开源 完虐COLMAP!百倍加速!ACEZero:全新SfM革新三维重建!
AI又进化?能实时捕捉表情换脸了?!!
这绝对是质量最高的单目深度估计开源方案!
英伟达最新开源|EmerNeRF全面基于NeRF的自动驾驶仿真框架无需分割!
吊打ORB3!73Hz!南洋理工重磅开源AirSLAM:无惧复杂光照的超强点线视觉SLAM!
图宾根大学最新提出 | 基于3D高斯的高效紧凑的三维场景表面重建技术
无人机|PID算法详解与实战(上)
多视图几何方式的三维重建
经典SLAM框架LOAM升级版!Fast LOAM,速度提升3倍!
军事技术大泄密!多旋翼无人机移动平台自动降落算法,可应用航母上无人机自动降落
Mobile-Seed:联合语义分割和边缘检测!
NeRF革新?PF-LRM:Transformer引领的稀疏NeRF模型——三维重建的未来!
MIT重磅开源!别再用COLMAP了!FlowMap给你最精确的SfM!
3D Gaussian Splatting还能更快吗?200+FPS!15倍压缩!
ECCV'24开源 高质量&实时性兼顾!清华最新3D人像重建SOTA
Splatam:用于稠密RGB-D SLAM的3D高斯的溅射、跟踪和建图
[ICCV 2021] 基于水体流动的可微框架进行水下单目3D重建
当MVS遇上Gaussian MVSGaussian 快速、可泛化的高斯重建框架!
Facebook展示可实现人体超高清3D模型的全新算法“PIFuHD”(CVPR2020)
手搓一枚制导火箭:00后B站硬核UP主LShang001
GS-SLAM:具有3D高斯溅射的稠密视觉SLAM
ICRA23开源 动态环境下高鲁棒的雷达MOT SLAM!
[IROS2021] TUPPer-Map:用于 3D 语义建图的时间和统一全景感知
国防科大最新 | DistGrid:基于分布式神经辐射场阵列的大规模场景重建
CVPR2022 基于神经网络的3D重建
重磅开源SA-GS:重新定位最新大场景3D重建SOT
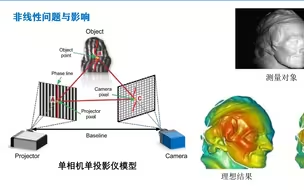
结构光的非线性问题与校正
互补滤波姿态估计、卡尔曼滤波姿态、高度估计
CVPR 2024开源 VSRD:无需LiDAR和标注使用2D渲染解决3D检测的新范式!
ECCV'24开源 !无惧遮挡、动态、光照变化!最鲁棒的3DGS震撼来袭!
CVPR2021,结构光低计算成本准确恢复分段平面场景
ICCV 2023开源 屠榜Waymo!超强3D目标检测范式DetZero!
MA-LIO:使用逐点 LiDAR 间不确定性传播的异步多LiDAR 惯性里程计
最新!无人机动态环境感知&规划新思路!
神奇!树脂+玻璃+手机就能制作3D全息投影?
[CVPR2022] StyleMesh:室内 3D 场景重建的风格转移
CoDIT'24 | 超越DRL!SD-DRL:将安全约束融合在抓取任务中!
(公开课)视觉SLAM原理与ORB-SLAM3系列算法