V
主页
浙大团队在RCC2024比赛中荣获冠军!|IROS24 首届机器人建造挑战赛(RCC)清华大学智能产业研究院(AIR)等主办
发布人
恭喜浙大团队在RCC2024比赛中荣获冠军!|IROS24 首届机器人建造挑战赛(RCC)由清华大学智能产业研究院(AIR)与清华大学土木系冯鹏课题组(FENGSLAB)联合主办,求之科技和D-Robotics共同赞助。本次比赛共有四支队伍进入决赛,浙大团队凭借其精准的操作控制,使用AIRBOT Play以绝对领先优势夺得冠军!同时,其他队伍的精彩表现和卓越实力也给我们留下了深刻的印象。让我们一同回顾他们在比赛中的精彩瞬间~
打开封面
下载高清视频
观看高清视频
视频下载器
机器人能炒菜叠衣服取快递丢垃圾?AIRBOT Play持续进化中!
具身智能!求之科技(DISCOVER Robotics)欢迎您来到具身智能时代!
预售开启| AIRBOT Play 正式发布
龙年贺岁|具身智能时代即将到来,AIRBOT您的具身智能伙伴
聚焦农业机器人发展 未来农业人工智能与机器人技术Workshop回顾@IROS 2024
PEGG-Net Isaac Sim Demo
使用Isaac Sim和ROS2实现大田农业机器人
AI奇点说 | 第九期:未来走进现实,机器人开始“上岗”你准备好了吗?
2025顶会热点!三小时带你吃透【具身智能】 ,第二讲——LLMS for robotics
Nvidia具身最新成果:GR00T-Control引领人形机器人智能控制
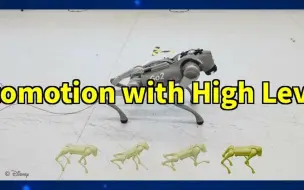
RobotKeyframing:四足机器人学习高层次目标的运动|2024【迪士尼】
【清华机器人】机器人迈向ChatGPT时刻!清华团队首次发现具身智能Scaling Laws
HOVER:多功能神经人形机器人控制器|2024【NVIDIA】
星尘智能 Astribot S1 x Physical Intelligence π0
2021年,出席清华大学建校110周年的嘉宾!
具身智能机械臂实操入门课程-04(完):模型推理和抓取效果验证
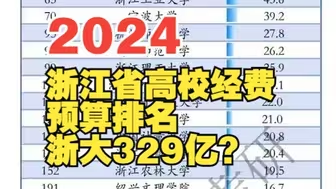
2024浙江省高校经费预算排名,浙大329亿?快来看看你的学校的经费是多少!
浙大电力电子硕士秋招开奖,年薪40W不是梦?
导师推荐的数据库!4个神级代码复现网站,里面99%的论文都能找到!
苏黎世联邦理工locomotion论文
CVPR 2024 Highlight 从视频中进行类别无关的交互手和物体三维重建
李飞飞学生联合创立,高密度科学家团队,灵初智能完成天使轮融资
RLBench官方教程1——界面和代码框架介绍
物理AI、机器人与自主性的未来:NVIDIA的全面技术布局
【真机演示】CrossDex:跨具身抓取,用一个策略控制任意的灵巧手
NVIDIA Isaac ROS 3.0:重塑机器人未来
人形机器人及具身智能创新论坛暨人形机器人具身智能标准发布会在沪顺利举办
人形机器人格斗比赛?清华x江淮中心联合孵化「零次方科技」双足机器人Z1首次公开亮相!
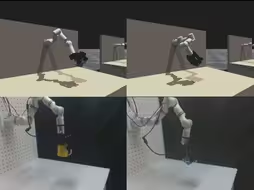
李飞飞团队佳作不断:聚焦机器人抓取交互,让机器人操作真正地适应各种环境
机器人迎来ChatGPT时刻!清华首次发现具身智能Scaling Laws!
这是一封邀请函!硅星人首届 “AI 创造者大会”,10月30号北京,我们等你来!
AI还能这么玩?!浙大&蚂蚁提出Framer:交互式插帧新框架,太丝滑了!
【StableDiffusion】2024最细最保姆SD全套教程!零基础入门到精通,全程干货无废话!逼自己一个周学完,允许白嫖,拿走不谢,AI绘画 AI商业
Lec8-1: Mujoco Tutorial- 仿真原理,核心模块,与机器人仿真器
孟晚舟香港中文大学(深圳)第九届研究生毕业演讲[完整版]
清北学子创办,自变量机器人完成亿元级融资
NeurIPS'24 | 原语驱动的世界模型 PIVOT-R实现任务泛化与效率双重 提升,成功率超过谷歌RT-1 26.6%
迪士尼溜冰机器人原型
究竟要什么样的人,才能考上浙江大学?来浙大紫金港校区看看吧
讲座 | 高泛化及样本高效的具身智能决策方法——清华大学智能产业研究院(AIR)在读博士李健雄