V
主页
地平线VAD又又又上新了!VADv2比v1强在哪里?一起来听
发布人
地平线开发者一直围绕着矢量化和高效率方面在做一些尝试,最新的工作VADv2首次引入多模态概率规划,用于建模决策天然的多模态特性,在Carla Town05上取得了目前最优的闭环性能,另外非判决式的多模态规划也更容易结合多种决策打分器,从而选择最合理的规划轨迹。欢迎大家多多交流~
打开封面
下载高清视频
观看高清视频
视频下载器
端到端算法是什么?自动驾驶领域是怎么做的?
如果地球上的所有人向月球照射激光会发生什么?
车祸前0.1秒退出智驾?致敬0.1秒手速合集
【全网首讲】大佬开讲:我们是否走在开环端到端自动驾驶正确的道路上?
战双露娜170cm的机器人,长高了的露娜,长大了的露娜,来到现实的露娜,露娜,腿部稍微动一下
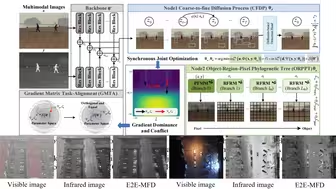
NeurlPS 2024 Oral | E2E-MFD 迈向端到端同步多模态融合检测 为智驾实现同步优化与性能提升
端到端数据格式是什么样的?快来看看吧
内卷白热化,如何治愈就业焦虑?
为什么说规划控制仍然是端到端自动驾驶的核心?全面复盘规划控制基础及决策规划框架
端到端模型上车了!GraphAD:国内首个可实车量产部署的端到端建模范式
自动驾驶中的多传感器融合都有哪些方法?基本流程都是什么?
【地平线×自动驾驶之心】在线高精矢量化地图构建SOTA方案MapTR v1/v2、LaneGAP
自动驾驶缺少数据怎么办?ChatSim助你生成高度真实的驾驶数据!
轨迹预测到底预测个啥???轨迹预测入门必备!
66元真的能带我走进现实
EM Planner is all u need?
使用YOLOv4完成激光雷达点云下的3D目标检测!
最短路径 迪杰斯特拉 dijkstra算法 数据结构与算法
自动驾驶规控工程师必备技能点!Coupling Trajectory Planning是个啥?
经验之谈,轨迹预测真正重要的是什么?
跟知乎大V一起来学BEV!视觉BEV感知和跟踪算法详解
极限越野 | "山猫" 全地形越野机器人
端到端自动驾驶:SparseDrive 算法详解
你笑问界长得丑,笑完还得回头瞅
机械手爬行
计算效率提升20% | 直接LiDAR-惯性里程计:具有连续时间运动校正的轻量级LiDAR-惯性里程计
ETH最新!CVPR2024 | GoMVS:多视图几何重建新SOTA
自动驾驶的规划控制究竟在做什么?我们为什么需要规划控制
看看顶级大佬如何梳理L2++决策算法的演进-上
清华大学最新!GaussianFormer:Gaussians进军视觉Occupancy任务!
牛的!大佬是如何几分钟聊透时空联合规划框架的?
ICRA 2024 | 轨迹规划的终极状态
全搞定!基于TensorRT的CNN/Transformer/检测/BEV模型四大部署代码+CUDA加速!
悬停!让地平线再次伟大!
“乱糟糟的世界你是我唯一的解药.”
ECCV2022 | DynamicDepth:无监督多帧单目深度的目标运动和遮挡分离
搞懂了!原来激光雷达和相机的内外参是这样标定的
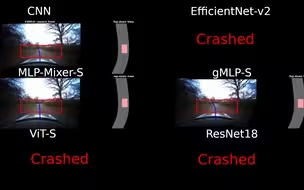
所有的视觉模型都是平等的吗?开环到闭环因果差距的研究
英伟达冠军方案!Hydra-MDP:多模态端到端自动驾驶详解
“陪你看日落的人比日落本身更浪漫.”