V
主页
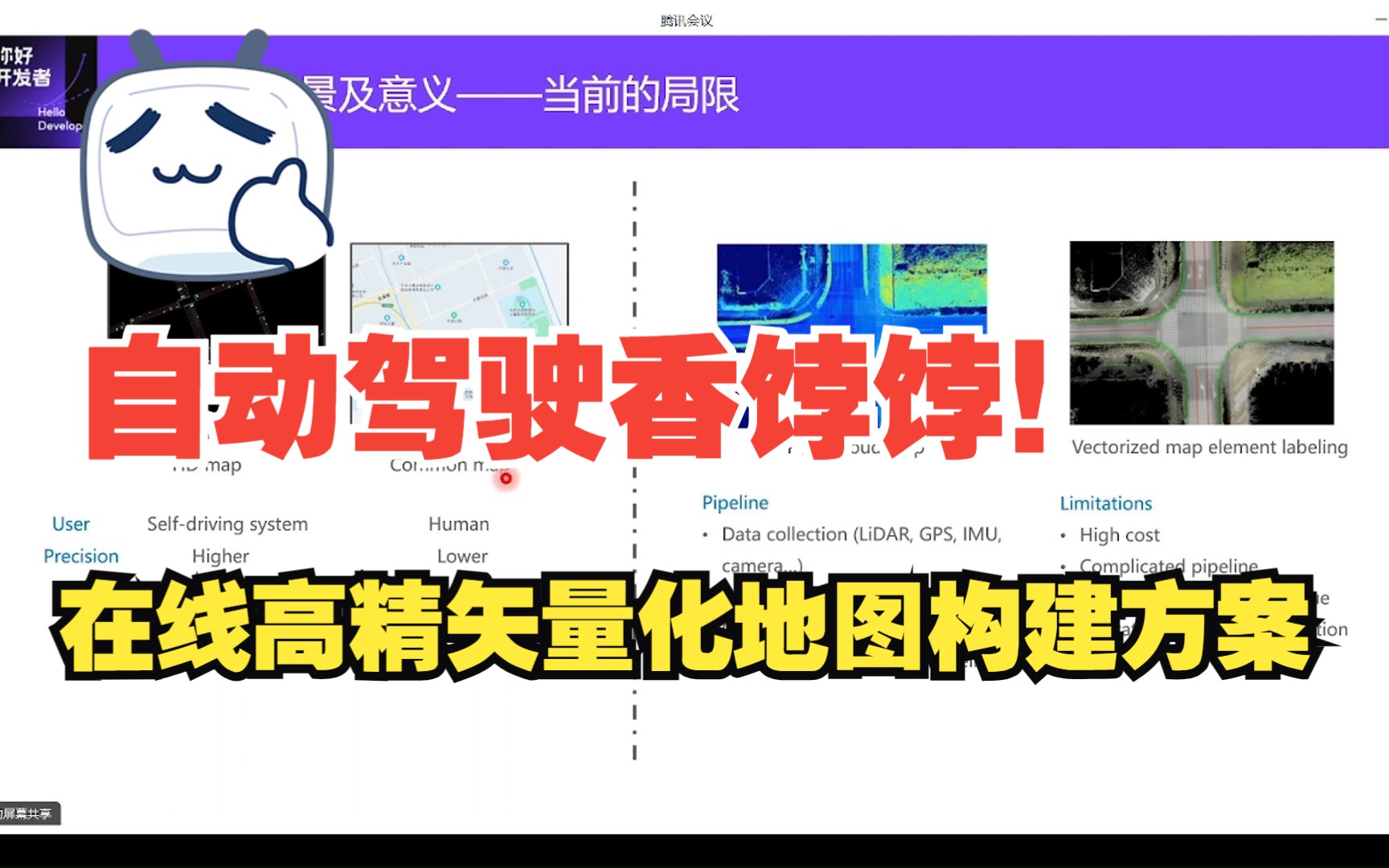
【地平线×自动驾驶之心】在线高精矢量化地图构建SOTA方案MapTR v1/v2、LaneGAP
发布人
地平线联合自动驾驶之心,共同邀请了华中科技大学Vision Lab在读博士&地平线算法实习生廖本成!为大家分享在线高精矢量化地图构建SOTA方案MapTR v1/v2、LaneGAP! 内容大纲如下: 1、研究背景及意义 2、MapTR 技术方案介绍 3、LaneGAP 技术方案介绍 4、MapTR v2 技术方案介绍
打开封面
下载高清视频
观看高清视频
视频下载器
在线高精地图与城市NOA是什么关系?为什么如此重要?
【地平线×自动驾驶之心】ICCV 2023最新中稿的端到端自动驾驶框架—VAD!
地平线VAD又又又上新了!VADv2比v1强在哪里?一起来听
华科&地平线最新!Senna:连接视觉语言模型与端到端自动驾驶
专注于学习PnC的端到端方法详解
自动驾驶中的多传感器融合状态估计如何建模?
速度和精度双SOTA! TPAMI 2022最新车道线检测算法(Ultra-Fast-Lane-Detection-V2)
数据为王!自动驾驶开源数据体系现状与未来
高精地图制作关键技术及领域主流方案分享-part1
Tesla FSD V13前瞻!
经验之谈,轨迹预测真正重要的是什么?
【全网首讲】大佬开讲:我们是否走在开环端到端自动驾驶正确的道路上?
ICLR'24无图新思路!LaneSegNet:基于车道分段感知的地图学习(实时推理+三项SOTA)
地平线最新SOTA!Sparse4D:迈向长时序稀疏化3D目标检测的新实践
从0到1!彻底搞懂BEVFormer算法原理
自动驾驶仿真大观:聊聊仿真的研究背景
端到端基础!绕不开的感知模块
自动驾驶仿真框架CARLA教程(3):Car Agent强化学习环境
英伟达最新 | OmniDrive:用于3D感知、推理和规划功能的自动驾驶大语言模型
自动驾驶的规划控制究竟在做什么?我们为什么需要规划控制
【CVPR 2024】SIN-SLAM:基于神经隐式表征的稠密语义SLAM
轨迹预测到底预测个啥???轨迹预测入门必备!
多模态3D检测相关2D和3D感知基础知识
牛的!大佬是如何几分钟聊透时空联合规划框架的?
今年的智驾只有一个声音:端到端+大模型
EM Planner is all u need?
端到端趋势下,传统规控还有未来么?
ICCV2023 | MPOT:多平面目标跟踪
落地之殇 | 联合预测是端到端正确的道路么?
拯救你的CUDA!什么是bank,为什么会发生bank conflict???
Depth Anything V2 | 速度提升10倍以上!更稳健、精细的单目深度估计(HKU&TikTok)
是时候总结一下过去这一年了!看看他们在自动驾驶之心分享了什么
自动驾驶方向博士申请小白指南,看这个就够啦 !从论文准备到套磁导师!
自动驾驶缺少数据怎么办?ChatSim助你生成高度真实的驾驶数据!
看完缓解了我的玉玉症!手把手教你如何使用CUDA进行矩阵乘法!
自动驾驶多传感器数据融合(4):多目标跟踪算法
ICRA2023 | 激光雷达相机内外参联合标定方案!
自动驾驶面试一百问!秋招社招全搞定
R3LIVE++:一个实时鲁棒的紧耦合激光雷达-惯性-视觉融合框架
【CVPR2023】 自动驾驶场景下理解BEV目标检测的鲁棒性