V
主页
自动驾驶中的多传感器融合都有哪些方法?基本流程都是什么?
发布人
自动驾驶中,多传感器融合是主流,都有哪些方法呢?基本流程都是怎么样的?完整课程咨询小助理微信:AIDriver004 自动驾驶之心官网正式上线了:www.zdjszx.com(海量视频教程等你来学) ①YOLOv3~YOLOv8/YOLOX/PPYOLO系列全栈学习教程 ②国内首个BEV感知全栈学习教程(纯视觉+多传感器融合方案) ③多传感器融合中的毫米波雷达-视觉融合感知全栈教程 ④Lidar+Radar+Camera+IMU离线/在线近20+标定方案教程等你来学 ⑤模型部署实战:基于TensorRT的CNN/Transformer/检测/BEV模型四大部署代码+CUDA加速 ⑥规划控制理论&实战课程:PID、LQR、MPC全掌握 ⑦多传感器融合目标跟踪课程:基于贝叶斯/卡尔曼滤波的目标跟踪技术详解 课程咨询联系AIDriver004,科研合作及辅导联系AIDriver002。
打开封面
下载高清视频
观看高清视频
视频下载器
自动驾驶中的多传感器融合状态估计如何建模?
太详细了!多传感器融合的策略和方法
超全干货 | 自动驾驶中的传感器融合:前融合+后融合+特征级融合(方法与策略)
多传感器标定的工具箱有哪些?
自动驾驶多传感器数据融合(2):IMU和GPS的融合定位
聊一聊多传感器目标跟踪中的最近邻匹配问题
讲明白了!端到端算法评估指标详解
分类突破!自动驾驶中的Occupancy感知方法分类
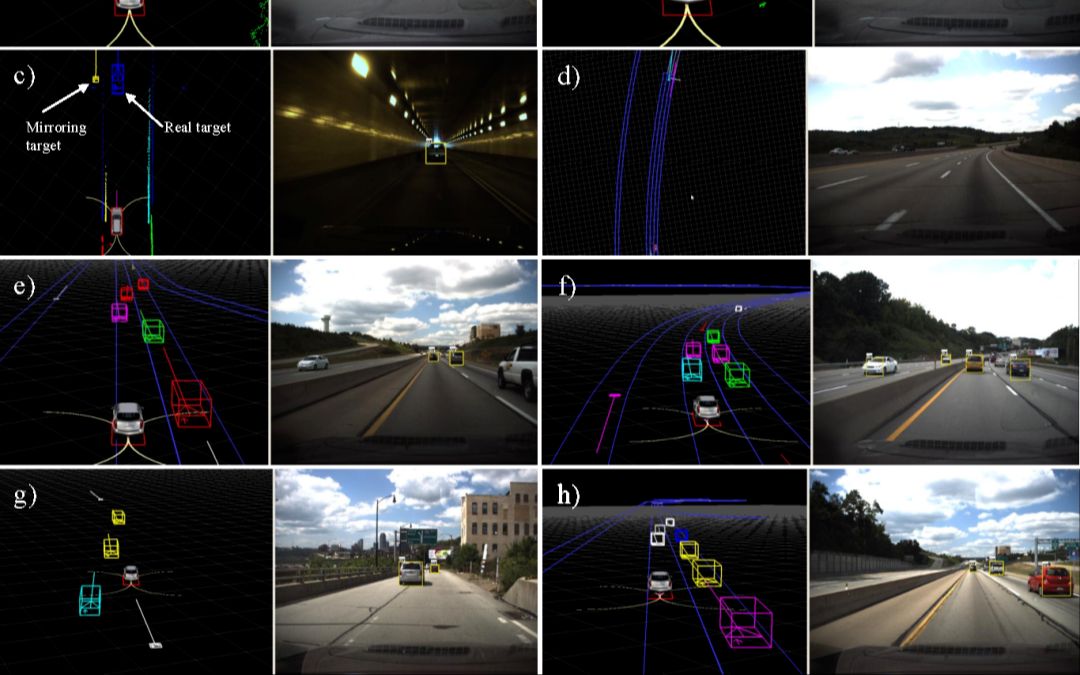
史上最全!一次性梳理自动驾驶鲁棒性研究
自动驾驶规划控制的未来是什么?
端到端自动驾驶:SparseDrive 算法详解
MetaBEV:解决BEV检测和地图分割的传感器故障新方案
自动驾驶多传感器数据融合(4):多目标跟踪算法
自动驾驶面试一百问!秋招社招全搞定
什么是端到端自动驾驶?什么是基础world model?
第一次通关新版本旅行
端到端基础!绕不开的感知模块
从零开始Mamba之路 | 如何从线性RNN的角度推导Mamba?
性能提升近40%!ViPlanner:室内外局部导航全搞定(ICRA 2024)
多传感器标定概述(Lidar/Radar/Camera/IMU/鱼眼相机)
特斯拉的World Model是什么?怎么做端到端训练?
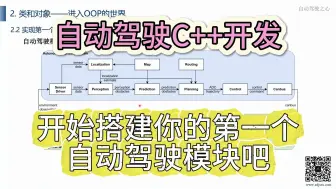
如何从零搭建自己的自动驾驶C++功能模块?
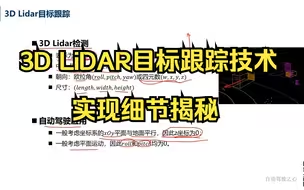
自动驾驶 3D LiDAR目标跟踪技术实现细节大揭秘!
ICRA2022 | 基于图的多传感器融合在自动施工机器人一致定位中的应用
R3LIVE++:一个实时鲁棒的紧耦合激光雷达-惯性-视觉融合框架
同时优化姿态和占用图!Occupancy-SLAM:基于优化的SLAM方法
传感器融合教程 Part 1 - 3D目标检测概述(3D Object Detection Overview)
BFS是个啥?为什么规划控制需要它?
浙江大学最新 | BEVPlace++:激光雷达全局定位方法,超越当前SOTA!泛化性能极佳
高精地图制作关键技术及领域主流方案分享-part1
自动驾驶系统都有什么?PNC今年的香饽饽!近10种规控算法与代码实现你都知道吗?
端到端算法是什么?自动驾驶领域是怎么做的?
上交&诺亚最新 | 大幅提升!OccGen:面向自动驾驶的生成式多模态3D占用预测
【深信科创联合制作】仿真数据的一百种玩法 | 基于Carla传感器的仿真数据增强实战来了!
《传感器原理及应用》考试重点+题库+试题及答案
为什么说规划控制仍然是端到端自动驾驶的核心?全面复盘规划控制基础及决策规划框架
面试必备!自动驾驶中BEV常考知识点大串讲
端到端算法有哪些优势?完爆传统感知规控?
【全网首讲】大佬开讲:我们是否走在开环端到端自动驾驶正确的道路上?
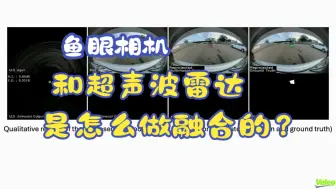
鱼眼相机和超声波雷达是怎么做融合的?