V
主页
清华大学最新!GaussianFormer:Gaussians进军视觉Occupancy任务!
发布人
清华大学最新!GaussianFormer:Gaussians进军视觉Occupancy任务!论文链接:https://arxiv.org/pdf/2405.17429 3D语义占用预测旨在获取周围场景的3D精细几何结构和语义信息,对于以视觉为中心的自动驾驶的鲁棒性而言是一项重要任务。目前大多数方法采用密集网格(如体素)作为场景表示,忽略了占用的稀疏性和对象尺度的多样性,从而导致资源分配不均衡。为了解决这个问题,我们提出了一种以对象为中心的表示法,使用稀疏的3D语义高斯分布来描述3D场景,其中每个高斯分布代表一个灵活的兴趣区域及其语义特征。我们通过注意力机制从图像中聚合信息,并迭代地细化3D高斯分布的属性,包括位置、协方差和语义。接着,我们提出了一种高效的高斯到体素的转换方法,以生成3D占用预测,该方法仅聚合特定位置的邻近高斯分布。我们在广泛采用的nuScenes和KITTI-360数据集上进行了大量实验。实验结果表明,GaussianFormer仅消耗了最先进方法17.8% - 24.8%的内存,就达到了与之相当的性能。
打开封面
下载高清视频
观看高清视频
视频下载器
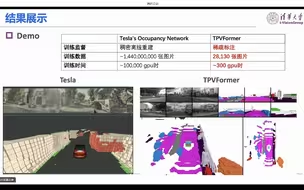
TPVFormer:特斯拉occupany network的学术替代方案!清华大学工作
透彻!特斯拉occupancy network详解
太强了!RenderOcc:仅使用2D标签和Nerf监督视觉Occupancy
特斯拉的World Model是什么?怎么做端到端训练?
上交&诺亚最新 | 大幅提升!OccGen:面向自动驾驶的生成式多模态3D占用预测
端到端趋势下,传统规控还有未来么?
端到端算法有哪些优势?完爆传统感知规控?
CVPR 2023 面向自动驾驶场景的纯视觉三维语义占有预测
超逼真的数据!实时高质量渲染,用于动态城市场景建模的Street Gaussians
清华大学&英伟达 | DriveEnv-NeRF:基于NeRF实现高逼真自动驾驶场景,离线测试!
Tesla惊艳的防碰撞机制是如何实现的?TESLA Occupancy Networks:Don’t Crash, EVER!!
端到端算法是什么?自动驾驶领域是怎么做的?
毫米波雷达-视觉融合感知方法(前融合/特征级融合/数据级融合)
2022最新!Nvidia完整阐释自动驾驶中的视觉感知(超赞技术)
牛津大学最新!室内室外SOTA | 用于视觉重定位的地图相对姿态回归(CVPR'24 HighLight)
EM Planner is all u need?
IROS 2024 | 苏黎世大学全新视觉里程计,性能暴涨60%!
UC伯克利最新!S3Gaussian:全球首个开源的自动驾驶场景3D GS工作
强推!这可能是导师都不讲的自动驾驶最新版教程,不愧是北航硕士团队分享!3小时就带我跑通了自动驾驶感知融合实战!简直比刷剧还爽!
毫米波雷达视觉算法CRAFT,这次彻底理解了!
上海AI Lab最新!Depth any Video:提升深度估计的一致性以及合成更多真实带有标注的数据
什么是端到端自动驾驶?什么是基础world model?
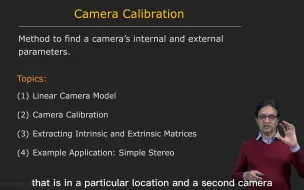
相机标定任务概述 | 哥伦比亚大学相机模型与标定系列课程(1)
CVPR2024最新BEV-Planner:Ego Status对于开环端到端自动驾驶的影响有哪些?
自动驾驶缺少数据怎么办?ChatSim助你生成高度真实的驾驶数据!
地平线VAD又又又上新了!VADv2比v1强在哪里?一起来听
视觉3D检测如何做自动标注?
大模型时代下的端到端自动驾驶(上篇)
ECCV 2022最新 | DynamicDepth:无监督多帧单目深度估计新SOTA!
爆肝整理!CVPR2024可复现论文合集,原文/代码/演示全都有!(深度学习/计算机视觉)
究极全面!CVPR2024可复现论文合集,原文/代码/演示全都有!(深度学习/计算机视觉)
太详细了!多传感器融合的策略和方法
2022最新!基于激光雷达的3D目标检测综述(超全数据集和SOTA方法汇总)
CVPR 2023 | BEVHeight:基于视觉的道路3D目标检测的鲁棒框架
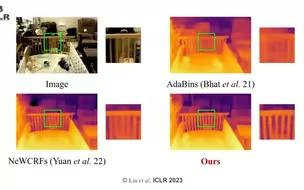
ICLR 2023 |VA-DepthNet:单目图像深度预测的变分方法
自动驾驶中的多传感器融合都有哪些方法?基本流程都是什么?
大纲一览 | 规划控制算法都在这里了!PNC今年的香饽饽!近10种规控算法与代码实现你都知道吗?
CVPR'23 | OCTraN:非结构化交通场景中的3D占用卷积Transformer网络
面试必备!自动驾驶中BEV常考知识点大串讲
决策规划都有哪些框架?PNC今年的香饽饽!近10种规控算法与代码实现你都知道吗?