V
主页
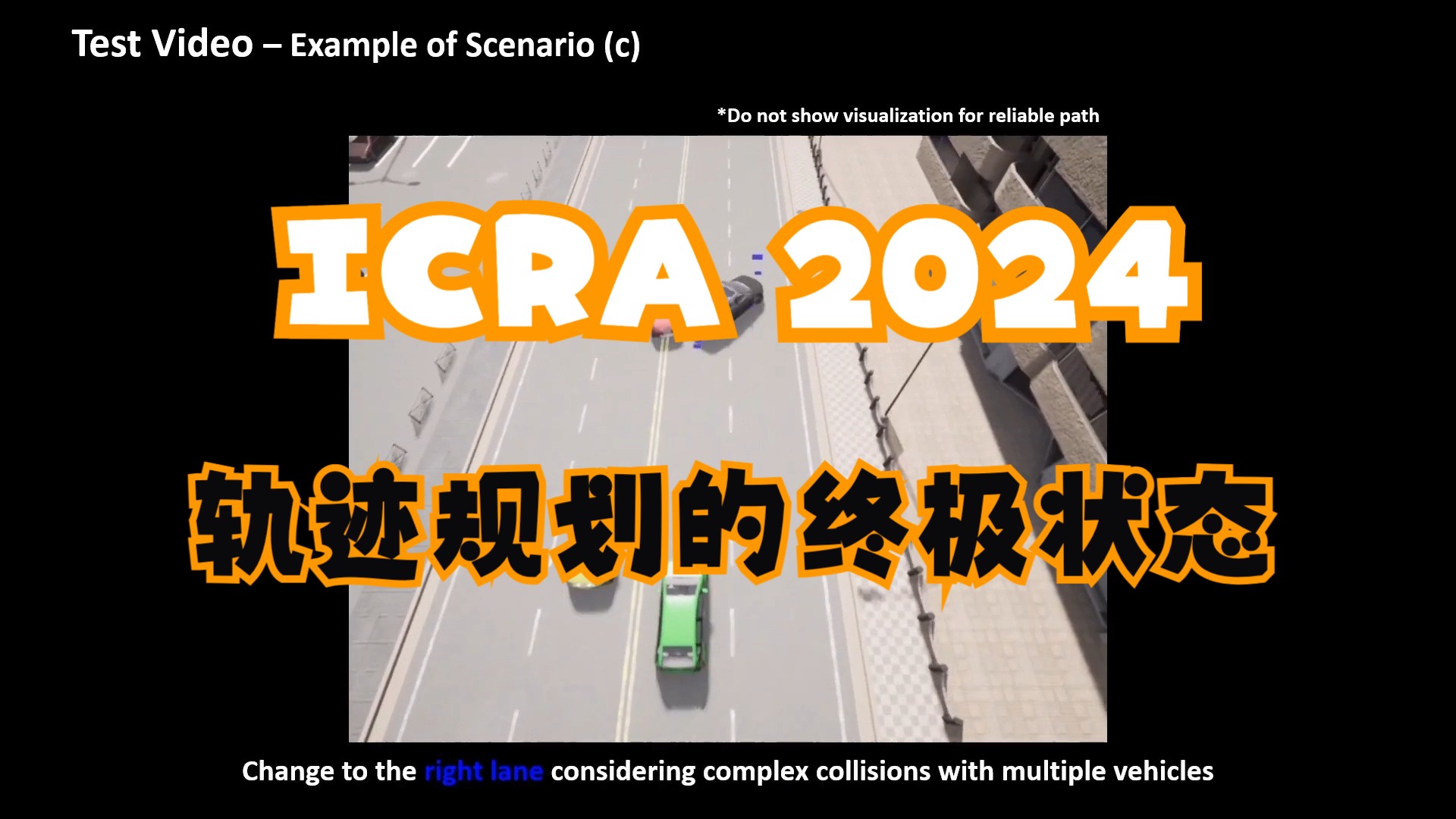
ICRA 2024 | 轨迹规划的终极状态
发布人
自动驾驶汽车的防撞/缓解系统(CAMS)是确保自动驾驶系统安全性和可靠性的关键技术。传统的避碰方法通过基于特定碰撞场景的规则来避免碰撞,从而在复杂和各种场景中挣扎。这导致了使用神经网络进行自适应避碰的基于学习的方法。然而,通过神经网络直接输出控制输入的方法在可解释性和稳定性方面存在缺点。为了解决这些局限性,我们提出了一种结合深度强化学习(DRL)和五次多项式(QP)轨迹规划的CAMS轨迹规划方法。所提出的方法使用DRL确定轨迹的终端状态和置信度,并在此基础上规划QP轨迹。通过利用轨迹的终端状态和置信度,而不是直接控制输入作为神经网络的输出,它生成了一条更真实、更连续的路径。此外,该方法通过RL的奖励函数以综合的方式考虑了碰撞避免和缓解。我们的实验结果表明,与现有的基于学习的方法相比,该方法不仅提高了可解释性和稳定性,而且在复杂和各种碰撞场景中都能保持性能。
打开封面
下载高清视频
观看高清视频
视频下载器
性能提升近40%!ViPlanner:室内外局部导航全搞定(ICRA 2024)
端到端算法是什么?自动驾驶领域是怎么做的?
端到端算法有哪些优势?完爆传统感知规控?
比赛冠军方案!英伟达最新 | Hydra MDP:端到端多模态规划
基于交互感知的自动驾驶车辆轨迹规划——神经网络与模型预估计控制的集成
ICRA 2023 | 直接激光雷达惯性里程计:具有连续时间运动校正功能的轻量级LIO(UCLA最新)
讲明白了!端到端算法评估指标详解
冠军分享!QCNeXt:面向下一代多智能体联合轨迹预测新框架(CVPRW2023)
轨迹规划新方案!基于差分平坦度的自动驾驶车辆轨迹规划
NeurIPS'24预讲会|大语言模型12篇工作:多智能体协作、端到端信息检索、高效微调架构、不确定性感知规划等
轨迹预测到底预测个啥???轨迹预测入门必备!
【ICRA 2023 | 首篇研究LiDAR基础设施部署的工作!作者亲自带你玩转传感器部署策略】第2节:高一致性传感器仿真模型库
【ICRA 2023 | 首篇研究LiDAR基础设施部署的工作!作者亲自带你玩转传感器部署策略】第3节:车路协同场景激光雷达部署策略优化方法
CVPR2023 Nuplan自动驾驶轨迹规划比赛第二名方案详解
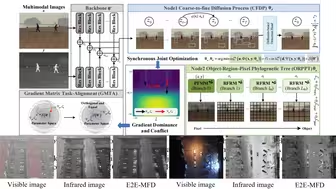
NeurlPS 2024 Oral | E2E-MFD 迈向端到端同步多模态融合检测 为智驾实现同步优化与性能提升
ETH最新!CVPR2024 | GoMVS:多视图几何重建新SOTA
2025秋招规控/轨迹预测,面试上来就问端到端联合预测。。。
自动驾驶中运动规划及控制的主要问题都有哪些?如何快速入门?
面试必备!自动驾驶中BEV常考知识点大串讲
一文尽览:自动驾驶大语言模型应用综述分享
支持在线时空标定!高效多传感器辅助惯性导航系统(ICRA2021)
【IROS 2022】机器人超硬核点云配准方法:Linewise Non-Rigid Point Cloud Registration
太亮眼!CVPR 2024 自动驾驶方向中稿论文POSTER大全!
终生SLAM框架!BioSLAM:用于一般地点识别的仿生终身记忆系统
透彻!特斯拉occupancy network详解
常考题!目标跟踪中如何定义最优关联匹配?
数据为王!自动驾驶开源数据体系现状与未来
牛津大学最新!室内室外SOTA | 用于视觉重定位的地图相对姿态回归(CVPR'24 HighLight)
牛的!大佬是如何几分钟聊透时空联合规划框架的?
Dobb·E 一个开源的家庭机器人操作臂端到端学习训练框架
从0到1!彻底搞懂BEVFormer算法原理
解决自动驾驶长尾问题,DOME模型结合扩散和OCC技术打造超真实世界模型
端到端自动驾驶离我们还有多远?Think Twice:CVPR 2023闭环新SOTA!
自动驾驶缺少数据怎么办?ChatSim助你生成高度真实的驾驶数据!
【ICRA 2023】COVINS-G: 一种协同可视化惯性 SLAM 通用后端
LeTS-Drive:自动驾驶中不确定场景下的实时路径规划算法
【ICCV 2023】 Robust Depth:多种天气条件下的自监督单目深度估计新SOTA
港大再放大招:FAST-LIVO2即将推出
元戎启行联手腾讯地图宣布2024年智能驾驶汽车发布合作
NeRF-RPN:第一个有效的基于NeRF的目标检测框架