V
主页
ETH最新!CVPR2024 | GoMVS:多视图几何重建新SOTA
发布人
论文链接:https://arxiv.org/pdf/2404.07992.pdf 项目链接:https://github.com/Wuuu3511/GoMVS 在这篇论文中,我们提出了GoMVS方法来聚合几何上一致的代价,以更好地利用相邻的几何信息。具体来说,我们通过利用局部几何平滑性和表面法线,将相邻的代价与参考像素对应并传播。这一过程是通过几何一致性传播(GCP)模块实现的。该模块使用表面法线从相邻深度假设空间计算与参考深度空间的对应关系,然后利用这种对应关系将相邻代价传播到参考几何上,最后通过卷积进行聚合。我们的方法在DTU、Tanks & Temple和ETH3D数据集上取得了新的最先进的性能。值得注意的是,我们的方法在Tanks & Temple的高级基准测试中排名第一。
打开封面
下载高清视频
观看高清视频
视频下载器
牛津大学最新!室内室外SOTA | 用于视觉重定位的地图相对姿态回归(CVPR'24 HighLight)
爆肝整理!CVPR2024可复现论文合集,原文/代码/演示全都有!(深度学习/计算机视觉)
港科技最新SLAM数据集!SLABIM:香港科技大学主楼SLAM-BIM耦合数据集
牛津大学IROS2023最新!激光雷达相机外参标定新算法(大幅降低误差)
Depth Anything V2 | 速度提升10倍以上!更稳健、精细的单目深度估计(HKU&TikTok)
车道线方案第一名!OpenLane Topology自动驾驶挑战赛(CVPRW2023)
逆天了!NeLF-Pro | 一个方法解决多种规模场景的快速渲染重建(CVPR'24)
CVPR2022 oral | 弱监督Lidar点云分割SOTA!8% 标注数据下达到 95.7% 的全监督性能!
太亮眼!CVPR 2024 自动驾驶方向中稿论文POSTER大全!
KITTI SOTA!即插即用,单目3D检测中的单应性损失!(CVPR2022)
【CoRL2022】路径规划新SOTA!PlanT:通过目标级表示的可解释的规划Transformers
端到端自动驾驶离我们还有多远?Think Twice:CVPR 2023闭环新SOTA!
Segment Anything之后,分割的路在何方?
CVPR2022 | SHIFT:当前自动驾驶最大的多任务合成数据集(雾天/雨天/雪天,检测、分割、深度图、实例分割、光流)
CNN+transformer结合:参数量减少92%,性能仍然超越SOTA!23种创新idea
香港理工大学最新!Slamesh: 使用激光雷达传感器进行实时定位和网格划分
2022最新!基于激光雷达的3D目标检测综述(超全数据集和SOTA方法汇总)
英伟达提出EmerNeRF:大规模动态自动驾驶场景重建
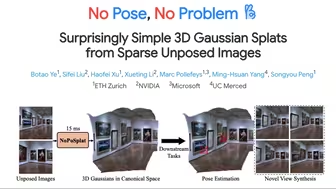
[3DGS进展] ETH, nVidia等提出NoPoSplat,简单的从稀疏无位姿图像生成3DGS的方法,在稀疏输入NVS、可泛化、位姿估计等任务均大幅度提升
【CVPR 2024】鉴智机器人算法大佬揭秘3D场景流估计的最新工作——3DSFlabelling
70年老算法Dijkstra被证明普遍最优 斩获顶会FOCS 2024最佳论文
自动驾驶中的多传感器融合都有哪些方法?基本流程都是什么?
ECCV 2022最新 | DynamicDepth:无监督多帧单目深度估计新SOTA!
为什么说规划控制仍然是端到端自动驾驶的核心?全面复盘规划控制基础及决策规划框架
CVPR2024 | 逆天了!一统所有目标感知任务,目标感知基础模型GLEE
经验之谈,轨迹预测真正重要的是什么?
世界模型!特斯拉CVPR2023 Workshop!
1分钟看完微软技术大会,微软发布最强量子计算机
ICRA 2024 | PeLiCal:机器人无目标外参标定新方案!鲁棒性拉满了~
18.4M参数,实现SOTA!EFFOcc:一个基于高效融合的三维占用网络的最小基线(清华大学最新)
地平线最新SOTA!Sparse4D:迈向长时序稀疏化3D目标检测的新实践
香港科技大学最新!MARC:自动驾驶的多极和风险意识应急计划
ECCV 2024 | 深度估计不死!DoubleTake:几何引导下的深度估计
CVPR 2024 | 相机标定算法再升级!基于圆锥曲线的无偏估计~失真也好用!
实时3D激光SLAM | 基于广义ICP和位姿图优化的实时无里程计方案(超赞!)
落地之殇 | 联合预测是端到端正确的道路么?
轨迹预测到底预测个啥???轨迹预测入门必备!
又酷又萌!无人巡逻小队首次亮相世界互联网大会
看看顶级大佬如何梳理L2++决策算法的演进-上
直播分享!最新SOTA,多模态3D目标检测新方案(CVPR2023)