V
主页
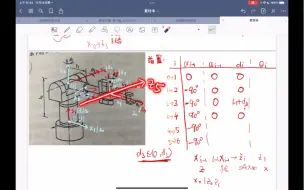
机器人学基础20221114
发布人
3蓝1棕:3Blue1Brown的个人空间_哔哩哔哩_bilibili 林沛群:台大机器人学之运动学——林沛群(含课件+书籍)_哔哩哔哩_bilibili up主水平有限,建议大家结合公开的课程食用本视频
打开封面
下载高清视频
观看高清视频
视频下载器
机器人技术基础(1)
机器人学:建模、控制与视觉——华中科技大学
【机器人理论最好中文入门课程 没有之一】 机械臂 系统 结构 旋转矩阵 变换矩阵 DH模型 运动学正逆解 轨迹规划 动力学 控制 遥控操作 教程
斯坦福大学公开课——机器人学
RoboMaster机器人基础 哈尔滨工业大学慕课2019
尤老师讲机器人机构学
机器人技术基础(3)
最好! 最细!最干!的机器人学导论!学完即入门,台湾教授亲自录制!
机器人学导论 MOOC
机器人学基础:并联机器人运动学与动力学分析
220610机器人学基础期末复习【莆田学院】
【中英字幕】现代机器人学 | Modern Robotics
机器人学之数理基础
机器人学导论 林沛群 (长视频版)
【东北大学】机器人基础原理_(房立金教授)
机器人技术基础(2)
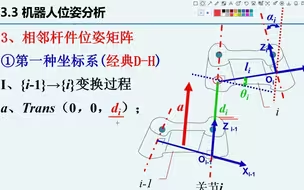
3-3DH法建坐标系
工业机器人技术基础(完)
东南大学 机器人原理及应用(共48讲)
斯坦福公开课【机器人学导论】全网最好!最详细!最干!的机器人学导论!学完及入门,原著作者亲自录制!膜拜!——(人工智能、深度学习、神经网络、机器学习)
机器人学 机器人技术 期末复习(涵盖机器人运动学和机器人动力学部分)
李群与李代数20221119
机器人DH法、运动学、雅克比(Jacobian)矩阵
SLAM里最小二乘问题20221119
【机器人学导论课程】台湾大学林沛群教授_人工智能AIoT(Robotics)学习参考教程,现整理分享给大家!
机器人原理及应用(搬运)
中南大学 蔡自兴 人工智能及其应用
机器人学之位姿运动学(2)
机器人 运动学 基础 经典DH变换
北理工2022秋-机器人控制技术基础
【公开课】“机器人学概述”+“机器人结构”| 华中科技大学:机器人学 01
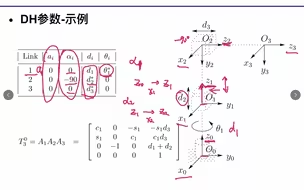
空间机器人技术-建模与控制基础:13.DH参数举例
【机械臂运动学教程】机械臂+旋转矩阵+变换矩阵+DH+逆解+轨迹规划+机器人+教程
机器人学 3.2 拉格朗日动力学算法(Lagrangian mechanics)
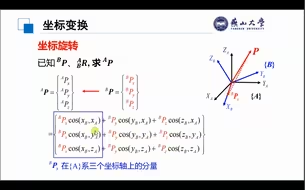
机器人学 l 2.2 坐标变换
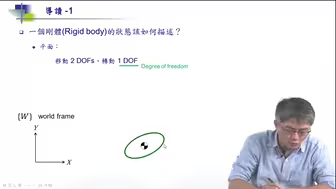
【机器人学】1-数学基础-1.1-空间位置和姿态
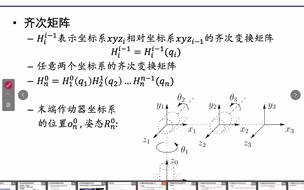
空间机器人技术-建模与控制基础:12.DH坐标系与DH参数
Основы мехатроники и робототехники 机器人学导论【第三章完结】
c++多线程基础20221106
【机器人机构学】DH参数法讲解-基于定义出发