V
主页
ICLR'24|GLiDE:通过反事 实扰动将语言计划植入演示,MIT让机器人掌握"常识",自主完成复杂家务
发布人
对于实体人工智能来说,将大型语言模型的常识推理建立在物理领域仍然是一个关键但尚未解决的问题。之前的工作重点是直接利用LLMs在符号空间中进行规划,而在这项工作中,来自麻省理工学院的研究团队推出了GLiDE:通过反事实扰动将语言计划植入演示,让机器人掌握"常识",自主完成复杂家务。该团队展示了他们的方法通过2D导航和模拟以及真实的机器人操作任务,提高了模仿学习的可解释性和反应性。 标题:GLiDE: Grounding Language Plans in Demonstrations through Counterfactual Perturbations 链接:https://yanweiw.github.io/glide/
打开封面
下载高清视频
观看高清视频
视频下载器
国内首个完成梅花桩复杂挑战的四足机器人!
用文心一言大语言模型和DrawIO自动画流程图
【全374集】2024最新清华内部版!终于把AI大模型(LLM)讲清楚了!全程干货讲解,通俗易懂,拿走不谢!
【智变纪元】人工智能技术2024发展现状
VEXIQ 风驰电掣 16球 飞轮版持续优化中
MIT提出最新时空语义SLAM框架:Khronos
移动机器人运动规划
重磅出炉!高翔《自动驾驶与机器人中的SLAM技术》新书配套课程发布
科技与狠活20:机械手矢量控制算法FOC之PID速度环惯性模式演示,之后关于FOC实验先告一段落了,回顾职场过往经历,聊聊未来计划,开始下一阶段挑战
能够完成复杂任务的空-地协作控制框架CoNi-MPC:基于非惯性系的空地协作模型预测控制
ICRA 2024 最佳学生论文奖 | NoMaD:基于Transformer用于 导航和探索的目标掩蔽扩散策略
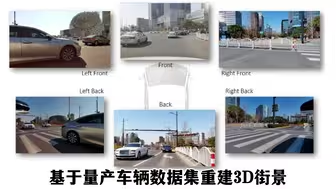
T-ITS | 秦通团队 Crowd-Sourced NeRF: 基于量产车辆数据集重建3D街景
我的ESP32机器人已经可以扫码连网啦
世界最大可操控人形机器人!八米!
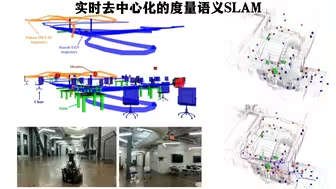
异构机器人无GPS协作!宾大重磅推出SlideSLAM:实时去中心化的度量语义SLAM
超强动画演示,一步一步深入浅出解释Transformer原理!这可能是我看到过最通俗易懂的Transformer教程了吧!——(人工智能、大模型、深度学习)
本地部署 Llama3.1 405B大模型!最简单的方法,支持CPU /GPU运行 !100% 保证成功!!
提升四足机器人各种地形运动适应性的方法DTC(深度跟踪控制)
移动 ALOHA ,学习低成本全身远程操作的双手移动操作
CVPR2024 | RegionPLC区域点云-语言对比学习,塑造3D开放世界场景理解新标准
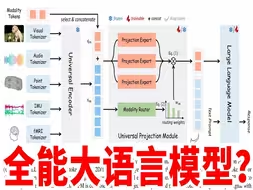
全能大语言模型?视频、音频、图像、医学、雷达、热成像八项全能?OneLLM如何做到?太可怕了!
10大与人工智能相关的<顶级会议>,哪些是你的投递首选?这些顶会论文与SCI论文相比如何呢?
我国高校今年发表的五篇关于无人机的创新性研究成果,每篇都是被顶刊录入的存在!
通义APP一天可以调用400次
导师放养,人工智能方向的研究生如何完成一篇SCI【无偿分享SCI发表保姆级指导手册】
被国产机器人硬控三分钟:非洲记者中文寒暄,机器人双语热聊
怎么这届新生的行李都能用机器狗搬了?
算法原理与代码实践融合讲解的NeRF精品课程之基础篇:体渲染
通义千问回答的过程看着更舒适了
【李宏毅】2024秋《生成式人工智能导论》教程!LLM大模型入门到进阶,一套全解决!2024生成式人工智慧-附带课件代码
端-云协同的视觉定位与重建及应用 | 章国锋
第十二期《智能无人机:从硬件到技术实战》
第十一期智能无人机线下实训精彩回顾
CVPR 2024 Highlight【清华、哈佛】|LangSplat:3D语言高斯溅射,告别模糊语言场,精准定义3D空间对象边界
全球最受关注的九款人形机器人,看完后细思极恐,难免生理不适
MIT Robotics - Neural certificates in large-scale autonomy design
机器人顶级期刊RA-L2023年 Best Paper "H2 Mapping:使用 分层混合表示的实时密集建图"
一窥大神们与中国智驾的这些年,入局智能驾驶汽车领域的12大企业的技术灵魂人物#端到端#人工智能#自动驾驶#智能驾驶#BEV感知#车载
【个人完全从0】训练仅有26M的小参数大语言模型!最低仅需2G显卡即可训练和推理!
CVPR'24 | 4K分辨率实时4D 视图合成,好于eNeRF30倍并达到了最先进的渲染质量