V
主页
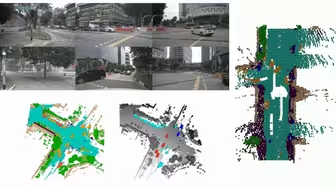
CVPR2024 | RegionPLC区域点云-语言对比学习,塑造3D开放世界场景理解新标准
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
SIGGRAPH'24 | 逆天!利用分层3D高斯表示,实时渲染超大规模场景!
Gaussian-Flow:使用动态3D高斯粒子进行4D重建
ECCV'24 开源 | 6DGS 又快又好,无需迭代的 单图像6D物体位姿估计
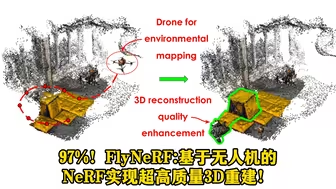
97%!FlyNeRF:基于无人机的NeRF实现超高质量3D重建!
3D Gaussian Splatting在自动驾驶中的应用——建模动态城市场景
CVPR 2024 | LiDAR Diffusion 首个可以根据多模态条件生成逼真 的激光雷达场景方法,加速107倍
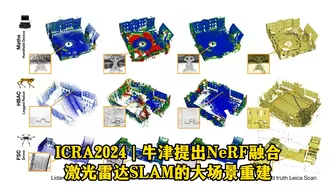
ICRA | 2024:牛津大学针对NeRF和激光雷达的缺点,提出了NeRF融合激光雷达SLAM的大场景重建系统
大疆 CVPR 2024 | AFNet自动驾驶中单视图和多视图深度的自适应融合
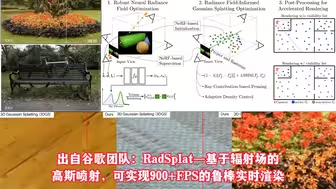
出自谷歌团队,RadSplat: 基于辐射场的高斯喷射,可实现 900+ FPS 的鲁棒实时渲染
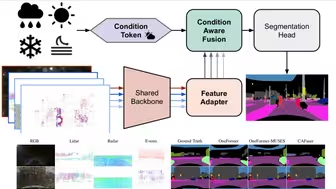
ETH新作CAFuser:条件 感知多模态融合 ,实现对 驾驶场景的稳健语义感知,多个下游任务SOTA!
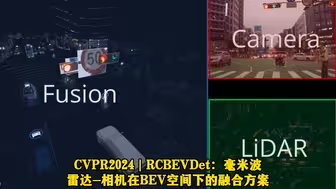
CVPR2024 | RCBEVDet:毫米波雷达-相机在BEV空间下的融合方案
超越BEVFusion!DifFUSER:扩散模型杀入自动驾驶多任务(BEV分割+检测双SOTA)
SA-GS:在3D高斯抛雪球中实现SAM任意物体分割,无需任何训练过程和学习参数,通过交互式过程实现3D高斯抛雪球物体分割
3D Gaussian Splatting再进化,即使是模糊的图像也可以渲染出高保真的3D场景了。
中国科大新作 | 基于3D高斯的多模态融合在无界场景中的定位和重建
MicroDreamer :20s零样本 生成3D mesh,显著降低3D物体 生成的神经网络迭代次数
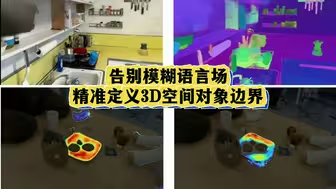
CVPR 2024 Highlight【清华、哈佛】|LangSplat:3D语言高斯溅射,告别模糊语言场,精准定义3D空间对象边界
nuPlan:世界上首个现实世界自动驾驶数据集和基准,旨在测试基于机器学习的规划器处理各种驾驶场景以及做出安全且高效决策的能力
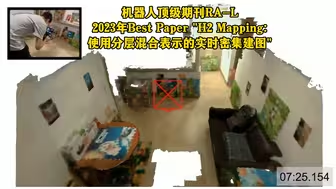
机器人顶级期刊RA-L2023年 Best Paper "H2 Mapping:使用 分层混合表示的实时密集建图"
NeurlPS'24 开源 | DC-Gaussian,基于3DGS的行车记录仪视频场景重建,有效去除反射遮挡
ECCV'24 | JHU提出无需SfM的X光3DGS技术: X-Gaussian,使得X射线新视图合成推理速度提升73倍!
NeurlPS'24 开源 | 使用VoxSplats 进行即时大规模场景重建,仅用3张 图像就可在20秒内重建百米大场景
RSS'2024 | MPCC++:升级无人驾驶安全盾牌,首次在现实中达到100%防撞率
来自Meta团队的SceneScript,LLM赋能“3D场景重建”,引爆你的AR/VR等应用体验,惊艳效果超越你的想象!
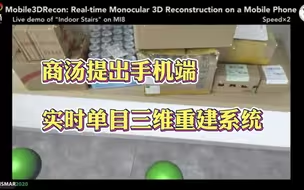
ISMAR 2020【最佳论文】商汤提出手机端实时单目三维重建系统!
ECCV'24 | 从BEV到OSP:自动驾驶场景建模新趋势,提供更灵活精确的空间预测
最新开源MVSGaussian:基于多视角 立体图像的快速通用高斯溅射重建 训练提速13倍,渲染300+FPS
基于图像的3D重建方法:无需COLMAP的3D高斯Splatting技术
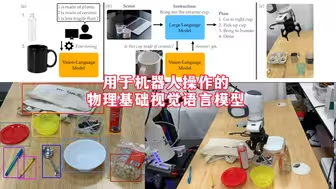
3.96万条众包和41.7万条自动化 的物理概念标注,助力VLMs突破 让机器人像人类一样理解物理世界
三维重建大一统!LSM:无需先验位姿,首次实现实时语义3D重建!
北大 | 文本驱动、全景世界文生3D全景世界大模型为元宇宙和VR带来新机遇
ETH最新!CVPR | 2024NeLF-Pro:用于多尺度新视图合成的神经光场探针,一个方法解决多种规模场景的快速渲染重建
Cam4DOcc: 面向自动驾驶的视觉4D占用预测新基准,代码已开源,欢迎来拍砖
CVPR2024 | 一统所有目标感知任务,华科&字节提出感知模型GLEE,一次性解决图像和视频中的几乎所有目标感知任务
NeurlPS'24开源 | 无与伦比的重建质量!3DGS-Enhancer:利用扩散先验增强无界3D GS!
Yann LeCun点赞转发,StableIdentity: 只需一张图片即可把任意 人像插入到任意场景中
按照国家自动化学会的标准,哪些车企的自动化能力是等级最高的
ECCV'24 | FPV-NeRF,Meta的新视图合成方法,为无人机空间感知带来革命性提升
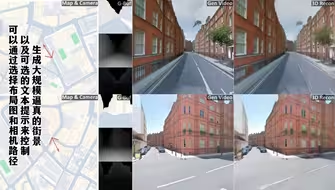
SIGGRAPH 2024 | Streetscapes:谷歌&斯坦福高调喊话:为智驾公司节省高开支,轻松实现“大规模街景生成
UCSD、MIT华人团队开源Open-TeleVision:沉浸式体验跨越3000里的机器人远程操作。