V
主页
DreamWaQ: legged robot walks in harsh environments with its imagination P1
发布人
DreamWaQ: Learning Robust Quadrupedal Locomotion With Implicit Terrain Imagination via Deep Reinforcement Learning I Made Aswin Nahrendra, Byeongho Yu, Hyun Myung Quadrupedal robots resemble the physical ability of legged animals to walk through unstructured terrains. However, designing a controller for quadrupedal robots poses a significant challenge due to their functional complexity and requires adaptation to various terrains. Recently, deep reinforcement learning, inspired by how legged animals learn to walk from their experiences, has been utilized to synthesize natural quadrupedal locomotion. However, state-of-the-art methods strongly depend on a complex and reliable sensing framework. Furthermore, prior works that rely only on proprioception have shown a limited demonstration for overcoming challenging terrains, especially for a long distance. This work proposes a novel quadrupedal locomotion learning framework that allows quadrupedal robots to walk through challenging terrains, even with limited sensing modalities. The proposed framework was validated in real-world outdoor environments with varying conditions within a single run for a long distance. https://www.youtube.com/watch?v=JC1_bnTxPiQ https://arxiv.org/pdf/2301.10602.pdf copyright ownership belongs to [KAIST Urban Robotics Lab]
打开封面
下载高清视频
观看高清视频
视频下载器
电流可达210A微型直流驱动器,最高可达300A,用于军工,转台,机器人#机器人 #驱动器 #仿人机器人
猜猜这个人形机器人下半身方案中的两个踝关节电机藏在何处
Go2使用教学10-编程模式
Go2使用教学01-开箱
(IROS 2023) 浮动基座机器人本体感受外部力矩学习及其在类人运动中的应用
基于分层优化的四足机器人全身运动控制搬运重物
Go2使用教学08-笨笨狗
人形机器人3d 打印手臂 网址在简介 欢迎关注三连
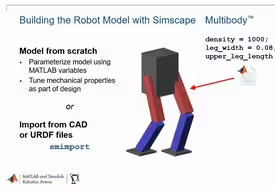
双足机器人步态生成 MATLAB and Simulink
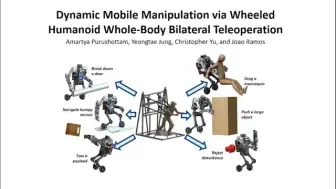
Dynamic Mobile Manipulation via Whole-Body Teleoperation of a Wheeled Humanoid
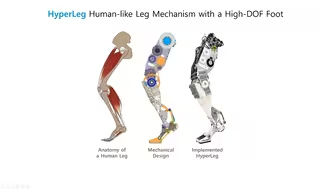
高度动态运动的类人机器人腿和脚
博士论文答辩 - Alexander Schperberg - 统一基于模型的优化和机器学习
【通用】人形机器人RL策略Gazebo二次仿真框架
Go2使用教学13-牵引步态
Go2开发教学05-底层服务接口
四足机器人控制器分享(webots+matlab)
机器人咖啡师来啦!
MPC and RL, two different roads to legged locomotion, and that's OK
Go2开发教学04-高层运动服务接口
人形机器人腿部机械结构设计 !很简单,有手就行!论文在简介
双足机器人的建模与仿真 MATLAB and Simulink
世界上最真实的人形机器人来了,支持多国语言交流
从工业巨头到人形助手:ICRA 2024亮点
我们把机器人拉出门散了个步,还是原来的模型,没有新训练 [Humanoid Parkour Learning]
人形机器人足底机械结构设计
【上新】SIGMA free ++++++++++版发布啦
Go2开发教学06-遥控器数据接口
斯坦福博士创办成立一年的机器人公司,天使轮拿下7亿融资
基于强化学习的机器人轴孔装配仿真
[强化学习]为什么我做的实验结果和论文里的结果不一样
使用ChatGPT 4,通过简单的文本提示生成人形机器人动作
【Github爆火】想要快速提升代码能力?强烈建议死磕这个项目!简直不要太强!堪称代码小白的救星!
【简单尝试】G1: DRL直膝行走,超省电
【官方双语】Transformer模型最通俗易懂的讲解,零基础也能听懂!
模型预测控制 (MPC) 从推导到C++ 实现,详细教程 仅使用 Eigen 库 代码在简介
可以使用镊子 夹芯片的 机器手 | ILDA灵巧手 #人形机器人
【2024最全实战项目】整整100个PyTorch练手项目合集,学习PyTorch入门小白最新版全套教程必备,练完即可毕业,练手项目~项目经验~毕设/课设
【比啃书爽!】2024最全线性回归、逻辑回归、KNN、决策树、随机森林、支持向量机、K-近邻算法、强化学习、贝叶斯算法...12大机器学习算法一口气刷完!
开源+中英双语教程!ACADO写NMPC轨迹跟踪,仿真里几乎没有误差
【2024】最全YOLO课程,带你从零开始入门YOLOv1-YOLOv10,小学生都看懂了!人工智能/目标检测/YOLOv10/v9/v8/v7/v6/v5