V
主页
京东 11.11 红包
港大MaRS实验室最新发布!基于LiDAR-视觉系统的神经表面重建与渲染
发布人
本文提出了一个统一的LiDAR -视觉系统的表面重建和渲染框架,集成了神经辐射场( NeRF )和神经距离场( NDF ),以从构成的图像和点云中恢复外观和结构信息。我们通过利用可见感知的占有率图将空间划分为空闲、被占、可见未知和背景区域来解决NeRF和NDF之间的结构可见差距。这种分类有利于恢复场景完整的外观和结构。我们使用空间变化尺度的SDF-to-density变换将NDF和NeRF的训练统一到结构和外观的细节层次上。所提出的方法通过自适应球体追踪采样策略利用学习到的NDF进行结构感知的NeRF训练,以实现精确的结构渲染。反过来,NeRF进一步细化了NDF中的缺失或模糊结构的恢复。大量实验表明,该方法在各种场景中具有优越的质量和通用性。 文章名称:【Neural Surface Reconstruction and Rendering for LiDAR-Visual Systems】 文章链接:http://arxiv.org/abs/2409.05310 项目主页:https://jianhengliu.github.io/Projects/M2Mapping/ 仓库链接:https://github.com/hku-mars/M2Mapping
打开封面
下载高清视频
观看高清视频
视频下载器
别再用SuGaR了!重磅开源SA-GS:重新定位最新大场景3D重建SOTA!
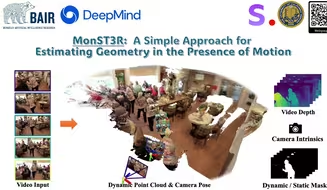
伯克利谷歌DeepMind发布MonsT3R:从动态视频重建4D场景
复杂环境下,基于Lidar的无人机自主飞行!港大最新发布!
清华最新开源:植被地形下轮式机器人的自主导航(附PPT!)
科研经历分享—基于不确定性分析的LIDAR位姿图优化
350km+的记录,cm级精度的数据集!用于自动驾驶的视觉长期定位!TUM开源!
【六哥答疑】多传感器融合SLAM都有哪些框架?作为研究生课题研究方向如何?
真强!无需再训练,直接输入即可生成真实的LiDAR点云感知读数!UIUC最新开源,ECCV2022!
中科大新发布|轻量级神经路径规划,高效、低成本的机器人导航方法!
神经辐射场(NeRF)在学术界被替代?为何说3D高斯才是未来大势?附9篇必读论文和源码
南洋理工新开源|高保真、低成本!实现超分辨率图像重建!
【最新开源】ECCV2022|清华用单目RGB视频实现人体捕捉3D重建!
【开源】普林斯顿大学发布|端到端深度神经视觉DROID-SLAM,大大超越传统方法!支持单目、双目和RGB-D!
加州大学搞定透明物体的三维重建,代码开源!
【完整版3D点云】学不会UP下跪!这是绝对是我看过最强的三维点云+三维重建实战教程!点云算法与NeuralRecon配置解读 计算机博士一次性给我教明白了!
图像分割、目标检测、特征提取、边缘检测、图像滤波、人脸识别,这绝对是B站最适合入门学习的OpenCV计算机视觉课程!从入门到图像处理实战!人工智能丨深度学习丨
ETHZ和微软重磅开源:首个联合检测与描述线特征的深度网络!无需标注,可推广任意数据集!
【直播回放】专门用于自动驾驶的LiDAR惯导标定方案
这可能是B站最全面的【3D点云+三维重建】教程!原理解读+实战分析,迪哥带你一口气学完!计算机视觉
【即将开源】肌肉+骨骼级的手部重建,连掌纹皱纹都清晰可见!中科院&上科大等新研究,SIGGRAPH2022
牛津大学|这个IMU+四个相机的视觉惯性里程计真不错!漂移率降低80%、相对位姿误差降低39%!
MIT发布|无需lidar和IMU之间的相对定位,即可提供高速率的里程计估计!
IROS22|动态环境下,资源受限机器人的惯性里程计!哈工大最新开源!
B站讲的最好的AI大模型实战(2024最新版)LLM+RAG系统+GPT-4o+OpenAI,全部都讲明白了!!
TUM&MCML发布|系统提高39.7%,基于深度多视图立体匹配的实时稠密建图!
FreeScan Combo 可以重建人体的手持扫描仪
CVPR2022|上科大&腾讯&Meta等新研究,人、物分层渲染,复杂交互场景下可快速重建!
【2024已完结】这可能是B站目前唯一能将【3D点云+三维重建】讲清楚的教程了,原理解读+实战分析,迪哥一次性全讲明白!—人工智能/神经网络/深度学习
开源!AI的移花接木大法!不止能“换头”!
ETH发布!轮腿式机器人的鲁棒自主导航与运动学习
武大最新开源:GNSS/INS组合导航开源代码KF-GINS详解
ICRA2021最新开源!基于泊松三维重建的激光雷达里程计和建图!
NeurIPS 2024 Mamba再下一城!Hamba:3D手部重建新框架
无需微调,即可进行场景特征匹配!CTU最新开源,ECCV2022
ECCV22|ETHZ&Meta发布关键点NeRF,输入两张图像就可重建高保真的头像模型!
ETHZ最新发布X-ICP 极端环境下鲁棒的激光雷达配准
即将开源!清华&北航&快手等研究DoubleField用于人体重建!CVPR2022
【直播回放】视觉几何三维重建学习心得分享及作业讲解
要啥激光雷达,2D、2.5D、3D地图我全都有,Factor Perception SDK纯视觉SLAM地图数据展示