V
主页
科研经历分享—基于不确定性分析的LIDAR位姿图优化
发布人
科研经历分享—基于不确定性分析的LIDAR位姿图优化
打开封面
下载高清视频
观看高清视频
视频下载器
MIT发布|无需lidar和IMU之间的相对定位,即可提供高速率的里程计估计!
【直播回放】专门用于自动驾驶的LiDAR惯导标定方案
【直播回放】SLAMesh:实时LiDAR定位与Mesh建图
第01讲 RTKLIB简介、安装、运行、调试(部分)
点云还能做预言家了?!德国波恩大学最新开源,自监督的三维点云预测!CoRL2021
香港理工最新开源|实时LiDAR定位与Mesh建图,首个基于CPU的实时激光雷达SLAM系统!
清华深研院、哈工深发布!Lidar视觉紧耦合实时相对定位
真强!无需再训练,直接输入即可生成真实的LiDAR点云感知读数!UIUC最新开源,ECCV2022!
港大新发布|多会话模式,长期关联LiDAR-IMU里程计和建图!
IMU选型、标定误差分析、AHRS组合导航
复杂环境下,基于Lidar的无人机自主飞行!港大最新发布!
如何更高效学习GNSS、RTK定位?(含30+论文及两本电子书下载)!
浙大&西交大等开源|使用贝叶斯核推理和优化的机器人自主探索!
【直播回放】一位学姐的SLAM科研经历和秋招经验分享!
武大最新开源:GNSS/INS组合导航开源代码KF-GINS详解
哈工大博士分享:基于NeRF的SLAM技术发展与代表性开源算法介绍(上)
收藏不亏!4个地方,可获得开放的激光雷达数据!
香港科技大学博士生分享:室外场景下的快速鲁棒点云全局配准(上)
1.2 如何快速学习开源代码?
【线下讲座】高翔:大规模点云地图的并行计算与交互式优化
【直播回放】在读博士从头手写VIO代码的经历分享
华科大最新工作分享:基于激光雷达-惯导-轮速计的联合状态估计!
太酷了!手持激光雷达,即可在线实时重建点云!牛津大学最新发布,可用于森林调查!
上海交大最新开源|GNSS/INS/Camera融合导航库GICI-LIB
瑞典皇家理工博士分享开源算法: 点云地图动态障碍物去除基准
哈工大博士分享:基于Gaussian Splatting的SLAM新发展与新论文(上)
无需微调,即可进行场景特征匹配!CTU最新开源,ECCV2022
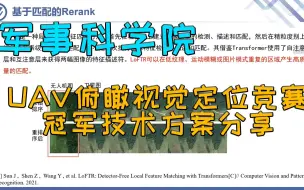
CMU & ICRA22 UAV俯瞰视觉定位竞赛冠军技术方案分享|军事科学院
手把手带你入门SLAM
双目VIO+点线特征+抗动态光照! 南洋理工最新开源!
MIT等开源|实时构建3D场景图,机器人探索大规模环境的空间感知算法!
如何用ChatGPT助力科研工作?上海交大博士最新经验分享!
【硬核课程】ORB-SLAM2重点梳理1:特征提取/匹配、图结构、地图初始化、跟踪、局部建图
经验分享:我的SLAM学习之路-答疑交流
仅需3张图像即可合成逼真新视图,学习NeRF并优化相机姿态!ETHZ&Google等开源,CVPR2023
ETHZ最新发布X-ICP 极端环境下鲁棒的激光雷达配准
SLAM入门简介及ORB-SLAM2论文精讲
2021年度盘点:十大最佳开源SLAM算法!
武汉大学博士生分享算法面向室内SLAM场景的点云超分辨率算法(上)
动态SLAM论文综述讲解(含30+论文下载)!