V
主页
ROS多线程 与 Linux进程(1)
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
ROS多线程 与 Linux进程(2)
ros+openai(3-2)tensorflow1
ROS+OpenAI(9)基础5-树莓派与虚拟机的ROS通信
嵌入式 C++ 急速入坑(1)
ROS+OpenAI(15)ROS-control
ROS+OpenAI(7)基础3-“服务”
ROS+OpenAI(8)基础4-动作
ros+openai(3-1)pycharm安装使用
ros+openai(3)本地安装
乐高-球形机器人
ros+openai(2)虚拟机演示
Deploying ROS Node on Raspberry Pi
【中字】最早的Arch Linux长啥样?
Setting up Arduino lib in ROS & Arduino IDE
ROS - Arduino serial basics
进程与线程究竟有哪些区别
一个线程读,一个线程写,需要加锁吗?
[开源]Moveit ROS Control Robot demo and Code details
Controlling Dynamixel with ROS_jdIo5hyAST0_1080p
ROS Robotics Tutorials _ Robot Operating System
用ROS搭建一台自平衡机器人
[ ETH RSL ] mANYpulator – 移动操纵 (Martin Wermelinger)
ROS+OpenAI(13)urdf进阶-xacro
ROS+OpenAI(11)基础7-tf2坐标变换与四元数
ROS+OpenAI(14)gazebo物理参数
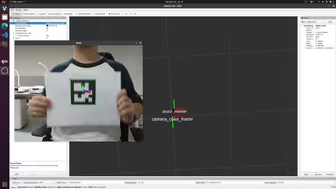
【考核用】调用opencv识别aruco码,在ros中更新tf
MCU过几年是不是都必须转Linux?
C6-2智能车的建图与自主实现教程
ROS+OpenAI(4-1)从零开始创建智能小车-建模
【开源无人船】从零组装一艘开源ROS无人船
ROS Arduino tutorials _ ROS Arduino serial communication example - Part 1
这个新款的树莓派有哪些不一样???
《ROS自主无人机:从理论到实践》首期训练营 自主定位| 场景重建| 规划导航
【开源无人机】从零调试一架开源无人机
内部imgui 基础讲解
Experimental Wave Drive
QT-组合导航上位机演示
组装一台3D打印机
【开源无人机】Vins_fusion代码讲解
终于有适合嵌入式裸机开发的框架了