V
主页
京东 11.11 红包
ECCV'24 NVIDIA | DiPIR:堪称"变色龙",可将3D物体无缝融合进各种场景,提升视觉真实感
发布人
#+“SLYYDS24”,领【24年100篇最新智驾论文➕多领域面试真题➕公开课课件回放➕高质量交流群】,备<100># 该论文中提出的方法利用大型扩散模型固有的场景理解能力作为基于物理的逆向渲染管道的指导。研究团队设计了一个具有场景特定个性化的扩散引导信号和一个可微分的逆向渲染管道来恢复照明和色调映射参数。该方法不仅可以将虚拟对象插入场景,还可以优化其他场景参数,例如插入对象的材质或解决相机之间的色调映射不匹配问题。 标题:Photorealistic Object Insertion with Diffusion-Guided Inverse Rendering
打开封面
下载高清视频
观看高清视频
视频下载器
清华叉院、理想提出DriveVLM,视觉大语言模型与自动驾驶融合,以提升自动驾驶能力
CVPR'24 Highlight 北大 | 扩展动态人景交互建模新突破, 生成的动作质量均优于现有技术
多传感器融合感知
ECCV'24 开源 | 6DGS 又快又好,无需迭代的 单图像6D物体位姿估计
浙江大学,百度 | 显著提升BEV三维物体检测性能的体素池方法:BEVSpread
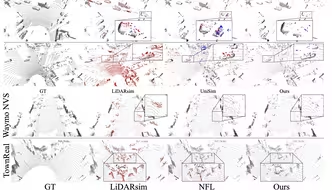
CVPR'24 Highlight 开源,DyNFL:使用NeRF对动态激光雷达场景仿真
CVPR 2024 | LiDAR Diffusion 首个可以根据多模态条件生成逼真 的激光雷达场景方法,加速107倍
MicroDreamer :20s零样本 生成3D mesh,显著降低3D物体 生成的神经网络迭代次数
CVPR 2024 | NVIDIA Research 获 CVPR 自动驾驶国际挑战赛“端到端自动驾驶”赛道冠军
【研2基本功 Score-based Diffusion 2】手搓Diffusion SDE,CCF-A向你招手
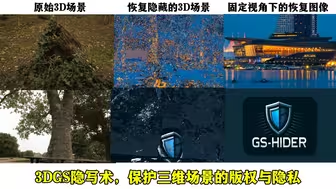
3DGS隐写术—GS-Hider,用以保护三维场景的版权与隐私【可在主页预约与3DGS相关的两场直播公开课】
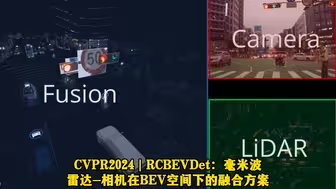
CVPR2024 | RCBEVDet:毫米波雷达-相机在BEV空间下的融合方案
nuPlan:世界上首个现实世界自动驾驶数据集和基准,旨在测试基于机器学习的规划器处理各种驾驶场景以及做出安全且高效决策的能力
大疆 CVPR 2024 | AFNet自动驾驶中单视图和多视图深度的自适应融合
CVPR2024 | SG-BEV:用于跨视图语义分割的卫星引导BEV融合,可实现精细的建筑属性分割
最强AI换脸算法,无缝实时,超高精度
BEVFormer一作分享,基于时空融合的BEV感知”
『算法可视化』VGG16 神经网络
端到端智能驾驶系统的优势与实现方式,以及端到端智能驾驶系统是自动驾驶的未来吗?
自动驾驶主流感知范式:BEV
清华最新综述:第一个专门针对NeRF在自动驾驶领域应用的调查,旨在弥补当前文献中存在的明显空白
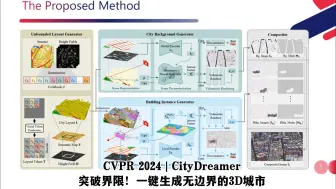
CVPR 2024 | CityDreamer突破界限!一键生成无边界的3D城市
RSS'2024 | MPCC++:升级无人驾驶安全盾牌,首次在现实中达到100%防撞率
ECCV 2024 代码开源 | HTCL:分层时间上下文,超过LiDAR,问鼎OCC,霸榜所有视觉方案
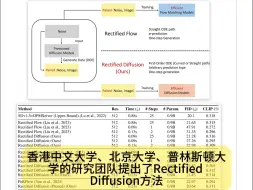
港中文提出Rectified Diffusion:更低成本,更优性能(今日Arxiv 10月11日)2024年10月11日Arxiv cs.CV发文量约147篇
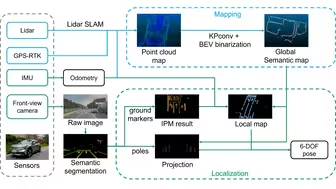
ICRA 2024 | 探索基于语义地图 的自动驾驶汽车单目定位技术
除了华为的自动驾驶系统能通过这20项民间硬核测试之外,还有哪家公司可以?
10大与人工智能相关的<顶级会议>,哪些是你的投递首选?这些顶会论文与SCI论文相比如何呢?
不受物体数量和类别限制的全方位3D分割OmniSeg3D:通过分层对比学习实现全方位3D分割
Cam4DOcc: 面向自动驾驶的视觉4D占用预测新基准,代码已开源,欢迎来拍砖
我国科研团队成功破解多旋翼无人机飞行失控难题,利用"被动容灾控制算法"保持安全飞行并实现可控返航
互联网人,如何“变道”自动驾驶?
DeepMind训练AI踢足球,技术精湛堪比真人
谷歌逆天AI技术RawNeRF,黑暗中的照片也能合成3D场景
IROS 2024 | 苏黎世大学全新视觉里程计,性能暴涨60%!
路径规划|基于维诺图的路径规划算法(ROS C++/Python/Matlab实现)
【字幕版】基于锚框的物体算法检测流程(可能是B站最全面清晰的讲述)
【双语】Score Entropy Discrete Diffusion models [ICML 2024]
自动驾驶行业中的BEV感知技术之美,上帝视角观摩感知技术
StreamPETR—作分享:稀疏向量化表征长时序建模