V
主页
CVPR2024 | LidaRF: 深入研究应用在街景 NeRF的激光雷达数据
发布人
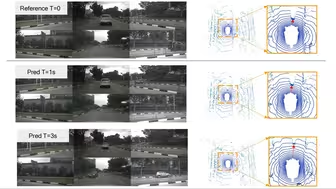
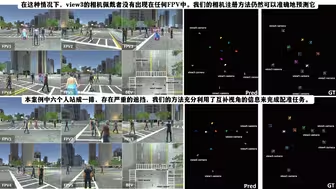
来自加州大学欧文分校、加州大学圣地亚哥分校、NEC Labs America的研究团队提出了LidaRF:深入研究应用在街景NeRF的激光雷达数据。LidaRF的贡献主要体现在三个方面:一,融合激光雷达编码和网格特征以增强场景表示。二,鲁棒的遮挡感知深度监督。三,基于激光雷达的视图增强。LidaRF在需要更大程度偏离输入视图的有趣应用(如变道)中也显示出优势,在具有挑战性的街道场景应用中显著提高了NeRF的质量。 标题:LidaRF: Delving into Lidar for Neural Radiance Field on Street Scenes 链接:https://arxiv.org/html/2405.00900v2
打开封面
下载高清视频
观看高清视频
视频下载器
SIGGRAPH'24 | 逆天!利用分层3D高斯表示,实时渲染超大规模场景!
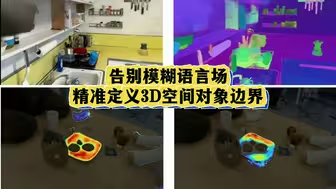
CVPR 2024 Highlight【清华、哈佛】|LangSplat:3D语言高斯溅射,告别模糊语言场,精准定义3D空间对象边界
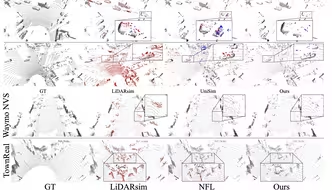
CVPR'24 Highlight 开源,DyNFL:使用NeRF对动态激光雷达场景仿真
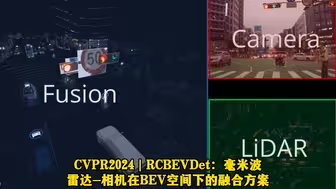
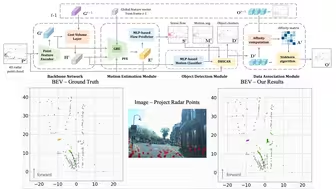
CVPR2024 | RCBEVDet:毫米波雷达-相机在BEV空间下的融合方案
SIGGRAPH 2024 | 上科大开源2DGS!几何精度降维打击3DGS!
NeurlPS'24 开源 | DC-Gaussian,基于3DGS的行车记录仪视频场景重建,有效去除反射遮挡
ICRA 2024|Lightning NeRF:速度提升10倍!为自动驾驶场景而生
NeurlPS'24 开源 | 使用VoxSplats 进行即时大规模场景重建,仅用3张 图像就可在20秒内重建百米大场景
CVPR2024 | RegionPLC区域点云-语言对比学习,塑造3D开放世界场景理解新标准
CVPR2024 | 利用任务分解改进BEV分割任务!
CVPR2024 | ADA-Track: 具有交替检测和关联功能的端 到端多摄像头3D多目标跟踪框架
浙大、上海人工智能实验室等即将开源PGSR: 平面3DGS提升表面几何,超越 2DGS、GOF,实现渲染新高度
CVPR 2024 | 如何给NeRF开透视眼?结合医疗领域的"它"就够了
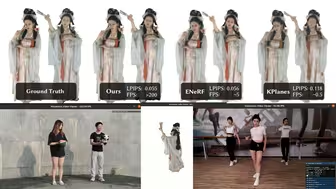
CVPR'24 | 4K分辨率实时4D 视图合成,好于eNeRF30倍并达到了最先进的渲染质量
一款面向无人机领域相关专业应用研究和二次开发的中小型自主智能无人机平台:问天L240自主智能无人机实验平台
CVPR2024 | SG-BEV:用于跨视图语义分割的卫星引导BEV融合,可实现精细的建筑属性分割
Gaussian-Flow:使用动态3D高斯粒子进行4D重建
MAVIS:使用基于SE2(3)的精确IMU预积分的多摄像头增强视觉惯性SLAM,该研究成果已被icra2024接受。
YOLO版本再升级 !YOLOv10:优化架构与无NMS训练提升实时目标检测效率
国内智驾老兵百度开源BEVWorld:通过统一BEV潜在空间实现自动驾驶的多模态世界模型
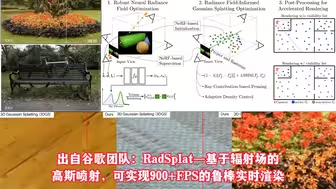
出自谷歌团队,RadSplat: 基于辐射场的高斯喷射,可实现 900+ FPS 的鲁棒实时渲染
中国科大新作 | 基于3D高斯的多模态融合在无界场景中的定位和重建
CVPR'24 | BEVSee: 无需相机校准的联合相机 和拍摄对象配准
两篇与3DGS有关的综述奉上,<3DGS:调查、技术、挑战和机遇>主:<高斯分层:3D 重建与新新型视图合成>
继3D高斯抛雪球法之后,4D高斯抛雪球模型问世,单视图视频也能快速生成动态3D对象了
【自动驾驶实践】多激光雷达实车安装&外参标定&拼接预处理
nuPlan:世界上首个现实世界自动驾驶数据集和基准,旨在测试基于机器学习的规划器处理各种驾驶场景以及做出安全且高效决策的能力
不受物体数量和类别限制的全方位3D分割OmniSeg3D:通过分层对比学习实现全方位3D分割
GaussianPro:具有渐进传播的3D高斯泼溅,该方法在Waymo数据集上明显超越了3DGS
CVPR 2024 | 进一步加速落地:压缩自动驾驶端到端运动规划模型,PlanKD:一种为压缩端到端运动规划器量身定制的知识蒸馏方法
IROS'24 普渡大学、麻省理工学院 | 5自由度触觉夹持器,性能匹敌仿生手,实现高效精确操控
算法原理与代码实践融合讲解的NeRF精品课程之基础篇:体渲染
视觉惯性-压力SLAM:水下考古遗址在线稠密三维重建
ICRA'2024 | 最新开源!RaTrack4D:使用4D雷达点云进行移动物体检测和跟踪
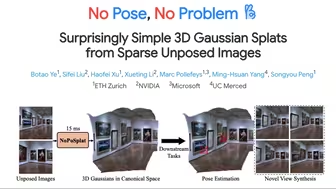
[3DGS进展] ETH, nVidia等提出NoPoSplat,简单的从稀疏无位姿图像生成3DGS的方法,在稀疏输入NVS、可泛化、位姿估计等任务均大幅度提升
3DGS技术在水下:实现散射介质中的高质量场景快速重建!
ICRA'24 | RGBManip:仅基于单目RGB相机的机器人自主环境感知和操纵,实现精准环境感知
ICRA 2024 最佳学生论文奖 | NoMaD:基于Transformer用于 导航和探索的目标掩蔽扩散策略
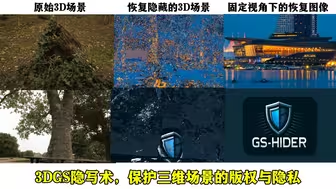
3DGS隐写术—GS-Hider,用以保护三维场景的版权与隐私【可在主页预约与3DGS相关的两场直播公开课】
CVPR 2024 | NVIDIA Research 获 CVPR 自动驾驶国际挑战赛“端到端自动驾驶”赛道冠军