V
主页
11_ROS服务通信案例1:生成多只乌龟C++
发布人
源码地址:https://github.com/Grizi-ju/ros_program 围绕四大通信方式(Topic、Service、Action、Param)的编程实操小项目,适合初学者入门ROS编程 包含: Topic:创建一个发布者、订阅者、二者结合; Service:生成多只乌龟、开关触发小车运动; Action:单目标点导航、多点巡航、调参; Param:参数通信...
打开封面
下载高清视频
观看高清视频
视频下载器
14_ROS动作通信2:代码实现导航至目标点
06_ROS话题通信1:从控制乌龟画圆到控制真车
改进A星算法(一)基础代码详解
15_ROS动作通信3:机器人多目标点巡航
ROS中自定义全局规划器(上)_算法部署
打死我也不删的绘图神器!一个神级科研图表网站,可以生成69种精美论文图表!
改进A星算法(三)权重系数
09_ROS话题通信4:PID思想使机器人沿墙行驶_wall_following
改进A星算法(五)贝塞尔曲线平滑
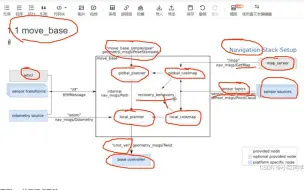
13_ROS动作通信1:move_base框架
在我家户型图上跑个RRT*全局规划器!
一个神级科研图表网站,可以生成64种精美论文图表!
10_ROS话题通信总结:理解传感器与执行机构
01_ROS编程系列大纲_【机器人方向师兄分享】
阿里二面:怎么利用多线程来导出百万数据到excel, 为什么使用多线程可以避免OOM?十年老鸟是这么说的。。
零基础也能学的安卓逆向C++进修课程:Frida高级逆向
2024版Java秋招面试突击课(7天速成面试高手)JVM,MySQL,并发,Redis,Spring全家桶,分布式与微服务,一周学完,金九银十面试直接上岗!
改进A星算法(六)双向搜索【直播带改】
改进A星算法(二)启发函数
【腾讯一面C++面试题】malloc的底层实现原理
在ROS仿真环境中写一个PID控制器(上)_python
改进A星算法(四)搜索邻域
2024新版C/C++音视频开发超详细教程【附配套视频资料】
【超详细】遗传算法(下)_matlab代码实现
【C++面试题】快手、虎牙、字节跳动一面C++多态相关的面试题
一分钟生成地球上任何区域!2024UE fest现场51Earth发布精彩演示视频
05_ROS中写代码的正确打开方式
07_ROS话题通信2:订阅里程计传感器数据
【快手校招一面】面试官:手写一个单例模式代码
自制OpenGL开源小引擎的新功能
02_机器人研究方向梳理
开源一个C#服务端框架
【首次开源】在RK3588上使用C++结合yolov8+bytetrack实现目标追踪
计算机学生学好四大件到底有多重要?四大件学习顺序及资料推荐
小破站高质量面试题:MySQL夺命连环56问(B+树、mysql索引、索引优化、SQL优化)7天学完,让你面试少走99%弯路!
【IDEA】一张图片就能生成代码!Fitten Code新版本太好用了
【超详细】遗传算法(上)_求解01背包问题理论
图的邻接链表 代码实现 数据结构与算法
QT-组合导航上位机演示
rust热重载插件