V
主页
【超详细】遗传算法(下)_matlab代码实现
发布人
视频讲解:云猫猫ky 视频剪辑:小巨同学zz
打开封面
下载高清视频
观看高清视频
视频下载器
【超详细】遗传算法(上)_求解01背包问题理论
A星寻路算法详解(下)_matlab代码实现(超详细!)
改进A星算法(一)基础代码详解
A星寻路算法详解(上)_matlab基础(超详细!)
【智能优化算法】粒子群算法 PSO算法基础与matlab代码实战(附:代码 课件)
【附:代码 课件】智能优化算法之【遗传算法】基础与matlab实战教学-人工智能
【超详细】蚁群算法(上)_理论概述
【智能优化算法】SA模拟退火优化算法讲解与Python实战-附:代码+课件
改进A星算法(五)贝塞尔曲线平滑
改进A星算法(三)权重系数
14_ROS动作通信2:代码实现导航至目标点
改进A星算法(二)启发函数
ROS中自定义全局规划器(上)_算法部署
ROS中自定义全局规划器(下)_代码说明
改进A星算法(四)搜索邻域
05_ROS中写代码的正确打开方式
02_机器人研究方向梳理
使用自定义RRT*全局规划器建图导航
ROS中实现A星与JPS三维路径规划_C++
06_ROS话题通信1:从控制乌龟画圆到控制真车
pure_pursuit纯轨迹跟踪算法在F1TENTH仿真赛道中的简单应用
在我家户型图上跑个RRT*全局规划器!
改进A星算法(六)双向搜索【直播带改】
在ROS仿真环境中写一个PID控制器(下)_C++
在ROS仿真环境中写一个PID控制器(上)_python
盲审通过,毕业快乐!
15_ROS动作通信3:机器人多目标点巡航
08_ROS话题通信3:订阅与发布结合控制小车
EchoMimic加速版,可编辑标志点控制实现逼真音频驱动的肖像动画
03_ROS的作用及学习技术路线
04_ROS开发常用工具配置
有电脑就一定要关闭这个设置,否则就会失去30%的运行速度
01_ROS编程系列大纲_【机器人方向师兄分享】
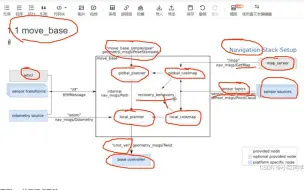
13_ROS动作通信1:move_base框架
秋招总结1
【前端面试】promise.finally的作用与实现
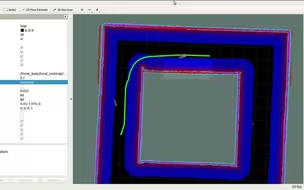
16_ROS动作通信3:导航简单调参效果
10_ROS话题通信总结:理解传感器与执行机构
【2024年8月最新chatgpt】GPT4.0免费使用教程,免登录就可以直接使用
11_ROS服务通信案例1:生成多只乌龟C++