V
主页
06_ROS话题通信1:从控制乌龟画圆到控制真车
发布人
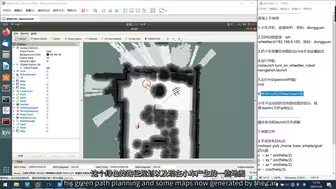
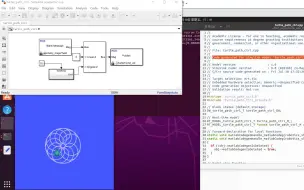
源码地址:https://github.com/Grizi-ju/ros_program 围绕四大通信方式(Topic、Service、Action、Param)的编程实操小项目,适合初学者入门ROS编程 包含: Topic:创建一个发布者、订阅者、二者结合; Service:生成多只乌龟、开关触发小车运动; Action:单目标点导航、多点巡航、调参; Param:参数通信...
打开封面
下载高清视频
观看高清视频
视频下载器
【开源】ROS乌龟跟踪和简单编队,学完别忘了应用!
17分钟学会用ROS控制无人机(逐句讲解代码)
【鱼香ROS】动手学ROS2|ROS2基础入门到实践教程|小鱼带你手把手学习ROS2
18.ROS机器人运动控制
19.在ROS中,用C++实现机器人运动控制
08_ROS话题通信3:订阅与发布结合控制小车
机器人操作系统 ROS 快速入门教程
16_ROS动作通信3:导航简单调参效果
ROS学习(1)小乌龟
10_ROS话题通信总结:理解传感器与执行机构
20. 在ROS中,使用Python编写运动控制功能
机器人操作系统ROS编程基础教程视频
ROS2让小乌龟螺旋运动
熬夜装了三次Ubuntu,终于装上了ROS,看到了小乌龟
13.在ROS中,使用C++编写Publisher发布者节点
ROS使用TF工具实现小乌龟跟随
12.ROS的主要通讯方式:Topic话题与Message消息
ROS话题通信之小乌龟随便跑
ROS海龟跟随实验
ROS小海龟跟随Python/C++快速实现
ROS|实验一 玩转小乌龟 (ROS基本命令)
机器人操作系统ROS零基础入门_ROS机器人入门课程【129课】
【ROS无人车教学视频大全】免费分享,允许白嫖!一次性教会你做ROS无人小车!附课件解析!!
03_ROS的作用及学习技术路线
11_ROS服务通信案例1:生成多只乌龟C++
ROS2话题练习:让小乌龟走直线
ROS用代码控制小乌龟转圈
14_ROS动作通信2:代码实现导航至目标点
02_机器人研究方向梳理
二、ROS小车视频教程
【2021.12.20更新】ROS机器人官方视频教程,从0开发ROS机器人
【控制】Simulink自动代码生成ROS C++ 控制小乌龟 Ubuntu
ROS|Ubuntu20.04安装ROS Noetic全过程(从VMware虚拟机安装开始)
05_ROS中写代码的正确打开方式
15_ROS动作通信3:机器人多目标点巡航
09_ROS话题通信4:PID思想使机器人沿墙行驶_wall_following
【Autolabor初级教程】ROS机器人入门
ROS中自定义全局规划器(上)_算法部署
ROS2话题练习:让小乌龟画矩形
12_ROS服务通信案例2_触发控制小车运动C++