V
主页
10_ROS话题通信总结:理解传感器与执行机构
发布人
围绕四大通信方式(Topic、Service、Action、Param)的编程实操小项目,适合初学者入门ROS编程 包含: Topic:创建一个发布者、订阅者、二者结合; Service:生成多只乌龟、开关触发小车运动; Action:单目标点导航、多点巡航、调参; Param:参数通信...
打开封面
下载高清视频
观看高清视频
视频下载器
14_ROS动作通信2:代码实现导航至目标点
08_ROS话题通信3:订阅与发布结合控制小车
09_ROS话题通信4:PID思想使机器人沿墙行驶_wall_following
06_ROS话题通信1:从控制乌龟画圆到控制真车
15_ROS动作通信3:机器人多目标点巡航
改进A星算法(一)基础代码详解
11_ROS服务通信案例1:生成多只乌龟C++
07_ROS话题通信2:订阅里程计传感器数据
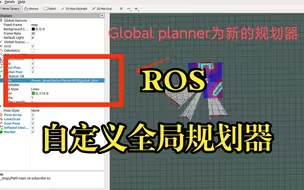
ROS中自定义全局规划器(上)_算法部署
ROS中实现A星与JPS三维路径规划_C++
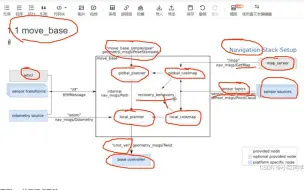
13_ROS动作通信1:move_base框架
ROS中自定义全局规划器(下)_代码说明
在ROS仿真环境中写一个PID控制器(上)_python
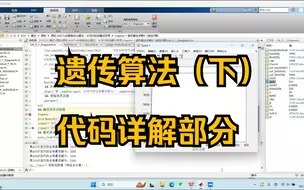
【超详细】遗传算法(下)_matlab代码实现
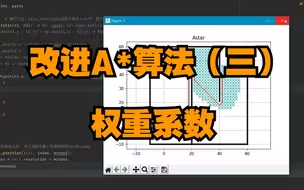
改进A星算法(三)权重系数
12_ROS服务通信案例2_触发控制小车运动C++
A星寻路算法详解(下)_matlab代码实现(超详细!)
04_ROS开发常用工具配置
03_ROS的作用及学习技术路线
改进A星算法(四)搜索邻域
改进A星算法(二)启发函数
使用自定义RRT*全局规划器建图导航
01_ROS编程系列大纲_【机器人方向师兄分享】
改进A星算法(六)双向搜索【直播带改】
【超详细】遗传算法(上)_求解01背包问题理论
盲审通过,毕业快乐!
在我家户型图上跑个RRT*全局规划器!
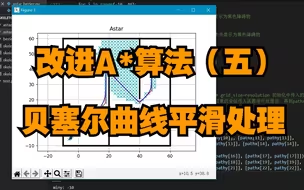
改进A星算法(五)贝塞尔曲线平滑
02_机器人研究方向梳理
【新课标2024最新版】【沪教版七年级上册英语教材同步讲解】【第1单元】
C与C++的区别究竟是什么?
pure_pursuit纯轨迹跟踪算法在F1TENTH仿真赛道中的简单应用
【书海】读书片刻——《阿佩尔均线操盘术》22 MACD与结构
【2024软考】14小时搞定软考高级系统分析师考试:教材精讲课程视频分享!(零基础通关‖入门讲解||有讲义‖含习题‖超级全)
【超详细】蚁群算法(上)_理论概述
劝退!2024还有人敢盲目自学计算机视觉的,我骂醒一个算一个!这里自学的水可深了,乱学只会毁掉你!机器学习|深度学习|opencv|人工智能
光学仿真第一课 矩形波导模式分析基础
【新课标2024最新版】【沪教版三年级上册小学英语教材同步讲解】【第2单元】
你看人真准!
【PR教程】值得死磕!(100集全)PR2024最新全套教程,带你少走99%弯路!比付费还强十倍!