V
主页
14_ROS动作通信2:代码实现导航至目标点
发布人
源码地址:https://github.com/Grizi-ju/ros_program 围绕四大通信方式(Topic、Service、Action、Param)的编程实操小项目,适合初学者入门ROS编程 包含: Topic:创建一个发布者、订阅者、二者结合; Service:生成多只乌龟、开关触发小车运动; Action:单目标点导航、多点巡航、调参; Param:参数通信...
打开封面
下载高清视频
观看高清视频
视频下载器
四轮小车导航规划,快速全局路径规划和局部路径规划,可以实现倒车规划,动态避障
搭建ROS机器人之用程序发布导航目标点
搭建ROS机器人之采集地图上的导航目标点
【鱼香ROS】动手学ROS2|ROS2基础入门到实践教程|小鱼带你手把手学习ROS2
搭建ROS机器人之用Python发布导航目标点
ROS小车-激光雷达slam室内导航实验
机器人操作系统 ROS 快速入门教程
【ROS机器人系统】自主导航+YOLO目标检测+语音播报
【赵虚左】《ROS理论与实践》第8、9章--ROS机器人操作系统
6.机器人SLAM与自主导航
基于ROS2的导航
ros2+gazebo+liosam+nav2导航仿真实现
二、ROS小车视频教程
08_ROS话题通信3:订阅与发布结合控制小车
16_ROS动作通信3:导航简单调参效果
06_ROS话题通信1:从控制乌龟画圆到控制真车
自主移动机器人-建图-定位-导航
ROS小车接收MATLAB自动发布的导航目标点来完成未知环境的探索及建图
【Autolabor初级教程】ROS机器人入门
移动机器人技术-实验课2-ROS amcl定位和move_base导航
ROS-SLAM地图构建和导航
多点导航(自编)
15_ROS动作通信3:机器人多目标点巡航
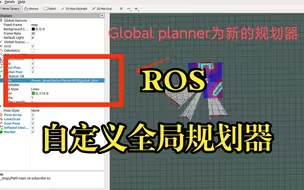
ROS中自定义全局规划器(上)_算法部署
基于ROS的机器人建图与导航仿真全过程
【2021.12.20更新】ROS机器人官方视频教程,从0开发ROS机器人
【ROS路径规划快速入门】ROS1 A星+PID 运行平台
19.在ROS中,用C++实现机器人运动控制
【新手视频教程】+SLAM建图+自主导航+语音交互+(miiboo机器人出品)
09_ROS话题通信4:PID思想使机器人沿墙行驶_wall_following
ROS中自定义全局规划器(下)_代码说明
一款开源的 ROS 航点导航插件
01_ROS编程系列大纲_【机器人方向师兄分享】
ROS入门必学导航算法-Navigation
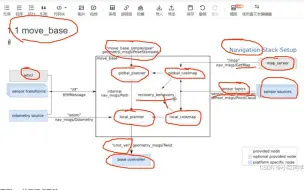
13_ROS动作通信1:move_base框架
ROS 2D导航原理系列教程合集(WHEELTEC)
盲审通过,毕业快乐!
05_ROS中写代码的正确打开方式
move_base,年轻人的第一次导航
02_机器人研究方向梳理