V
主页
最新CVPR2021论文,用于帧插值的压缩驱动网络设计
发布人
https://www.youtube.com/watch?v=KEUcw4xoB5E 视频帧插值是视频处理研究中最具挑战性的任务之一,相较CVPR2020的AdaCoF插帧网络相比,仅用四分之一的网络尺寸,就获得了显着的性能提升!注:另有同名微信公众号,欢迎点赞+关注!在公众号「3D视觉工坊」后台,回复「CDFI」获取论文链接!
打开封面
下载高清视频
观看高清视频
视频下载器
CVPR2021,基于多视点鱼眼图像的实时球面扫描立体成像
CVPR2021论文,NEX:基于神经基扩展的实时视图合成,速度快1000倍,代码开源!
CVPR2024开源NetTrack:跟踪高动态物体!
最新ICRA2021论文,EGO-Swarm:在杂乱环境中的全自动分散式四旋翼群系统
CVPR2021最新论文,基于内关联性的单目实时全身动作捕获,速率达到25帧/秒
CVPR 2021,点云配准工作!循环多视图对齐网络的无监督表面点云配准!
CVPR2021,FFB6D:用于6D位姿估计的全流双向融合网络,代码开源
ETH开源数据集SHIFT:一个用于连续多任务域自适应的合成驱动数据集 @3D视觉工坊 #CVPR2022
CVPR2022 用于城市环境重建的NERF
[CVPR2022] 使用单幅彩色点投影的深度学习高光谱和深度重建
CVPR 2021 HPS:无需外部传感器,大场景、长时间的动作捕获系统
CVPR2021|点云补全的方法梳理及最新进展分享
CVPR2022:GAN监督的密集视觉配准用于多种AR应用
Function4D: 从稀疏的消费级RGB-D相机中精确重建人体动作(CVPR2021)
[CVPR2021] MonoRec:无需激光雷达,单相机实现三维场景的稠密重建,去除运动伪影,泛化性能好!代码开源!
[CVPR2022] 阿里巴巴: 用于单目深度估计的神经窗口全连接CRF
[ICCV2021] DSEC:用于驾驶场景的双目事件相机数据集
点云3D深度学习模型与实践
CVPR2020|3D-MPA:用于3D语义实例细分的多提案聚合
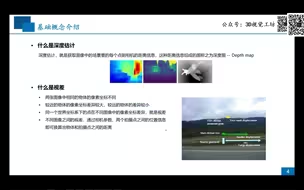
单目深度估计绪论
YOLOV4用于道路交通口智能人流、车流监控
107 FPS!开源!结合ICP和3D GS构建最快的稠密SLAM!
ICRA2021,OmniDet:用于自动驾驶的基于环视摄像头的多任务视觉感知网络
SIGGRAPH'2024|RTG-SLAM:基于3DGS的大尺度场景实时三维重建-上篇
[CVPR2022] ICG:融合区域和深度以实现无纹理对象的高效3D跟踪
无需标定板,高分辨率LiDAR和相机的像素级外部自标定,代码开源
[CVPR2022] StyleMesh:室内 3D 场景重建的风格转移
双目相机标定基础及标定实战
四旋翼无人机-PX4控制算法原理
Occupancy Networks后处理
当MVS遇上Gaussian MVSGaussian 快速、可泛化的高斯重建框架!-上篇
CVPR2022 3维通用Corruptions和数据增强
清华最新开源万能3D分割一切!
CVPR2022 深度方向感知功能图
CVPR2022 EMOCA:情绪驱动的单目人脸捕捉和动画
SIGGRAPH 2021,AI武术指导化!帮助动画师生成武术动作!
神奇!树脂+玻璃+手机就能制作3D全息投影?
单目无监督深度估计综述
清华搞定无人机!LVCP:雷达-视觉紧耦合协同定位!无需先验地图和初始位姿!
Comsol制作代理模型教程-深度神经网络