V
主页
京东 11.11 红包
神奇!树脂+玻璃+手机就能制作3D全息投影?
发布人
https://www.youtube.com/watch?v=qNceVquu02o&t=7s 国外网友的DIY作品!用树脂+玻璃+手机就能制作一台3D全息投影!具体教程请看视频!注:「3d视觉工坊」:致力于传播3d视觉领域最前沿知识!每周一、三、五固定更新,内容包括:计算机视觉、3D视觉算法、SLAM算法、技术干货、顶会论文!另有同名微信公众号,欢迎点赞+关注!
打开封面
下载高清视频
观看高清视频
视频下载器
ISMAR 2020,宜家+苹果,实现混合现实家居设计!
无需标定板,高分辨率LiDAR和相机的像素级外部自标定,代码开源
Kivicube AR平台:低代码可视化编辑即可完成SLAM场景制作
3D视觉科研工具汇总
硬核理工男,7年手搓一枚SpaceX Mini返回式火箭
代码开源!伦敦大学学院:DSP-SLAM:物体特征级SLAM
梅卡曼德3D视觉引导高亮反光轴棒无序抓取
05 自动驾驶中多传感器信息融合理论(下篇)(Camera + LiDAR + Radar + IMU)
3D视觉应用-现代智慧农业
06 自动驾驶中实战基础之3D-2D求解方法(PnP系列)[Camera + LiDAR + Radar + IMU]
经典3d视觉论文回顾,Facebook用『SLAM+实时光流』实现AR真实遮挡效果,发表在顶刊 ACM Transactions on Graphic 2018
[ICCV2021] ROMO:单目、单阶段、多人的3D语义分割方法
WACV2023:基于结构光的RGB事件相机(代码开源)
02 自动驾驶中常用传感器硬件介绍(Camera + LiDAR + Radar + IMU)(中篇)
[ICCV 2021] 基于水体流动的可微框架进行水下单目3D重建
浙大+商汤联合工作,LoFTR:利用transformers对稀疏纹理进行匹配(CVPR2021)
上海科技大学:IROS2021 | 事件相机快速动态标定
炸裂!超快超高精度!普通手机也能运行的实时NeRF!
[IROS2021] TUPPer-Map:用于 3D 语义建图的时间和统一全景感知
[CVPR2022] 使用单幅彩色点投影的深度学习高光谱和深度重建
港科大最新 开放词汇3D物体检测新SOTA-CoDAv2p-下篇
刚刚不久,Apple 推出 Depth Pro AI – 3D 视觉的游戏规则改变者!
107 FPS!开源!结合ICP和3D GS构建最快的稠密SLAM!
点云3D深度学习模型与实践
Open3D与点云处理简介(公开课)
一键改变生活,这就是3D打印 | 科技生活
什么是3D视觉无序抓取?
ICRA2022:全局一致且紧密耦合的 3D LiDAR 惯性建图
四旋翼模型简介-御风250模型
CVPR2021,结构光低计算成本准确恢复分段平面场景
视觉快速定位与实时稠密简图简介
手搓一枚制导火箭:00后B站硬核UP主LShang001
3DGS涨点神器!收录顶会NIPS 2024!3DGS-Enhancer来了!
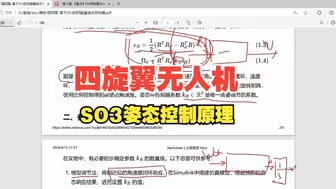
四旋翼无人机-SO3姿态控制原理
自动驾驶中的视觉感知技术
Arduino导弹防御雷达系统教程
无需额外训练!SAMPro3D:零样本3D分割一切!
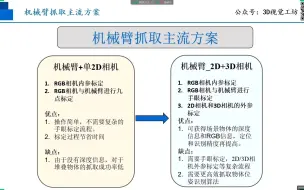
机械臂抓取简介
光学3D测量技术原理及应用
【3D视觉工坊】第四期公开课:求职经验分享