V
主页
最新ICRA2021论文,EGO-Swarm:在杂乱环境中的全自动分散式四旋翼群系统
发布人
https://www.youtube.com/watch?v=K5WKg8meb94&t=60s 来自浙江大学工作,发表在ICRA2021上。本文提出了一种分散的异步导航系统解决方案,仅使用机载资源,即可在未知的障碍物丰富的场景中进行多机器人自主导航。该导航系统是在基于梯度的局部导航框架下制定的,通过将碰撞风险表述为非线性优化问题的代价来实现避免碰撞。为了提高鲁棒性并避免局部极小值,采用了一种轻量级的拓扑轨迹生成方法。最终,该方法的效果在仿真和实际实验中得到了证明,具体的效果请看视频!
打开封面
下载高清视频
观看高清视频
视频下载器
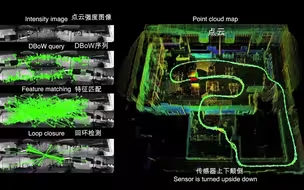
最新ICRA2021论文,基于成像激光雷达的稳健位置识别,代码开源!
ICRA2021,这台无人机不怕撞机!狭小环境下无人机弹性碰撞自主导航!
GPA:凝视增强感知系统,视觉辅助无人机安全飞行(ICRA2021)
港大火星实验室:在大规模杂乱的3D环境中进行快速无人机探索方案
无人机自主探洞!大规模三维环境中无人机基于图的拓扑探索规划(ICRA2021)
[ICRA2021] SDK:基于深度学习和显著性估计的点云关键点检测
[ICRA2021] 基于自动行为树的机械臂系统异常处理框架
中国科大 | 性能增强的四旋翼运动规划器用于复杂动态环境中的自主飞行
ICRA2021,OmniDet:用于自动驾驶的基于环视摄像头的多任务视觉感知网络
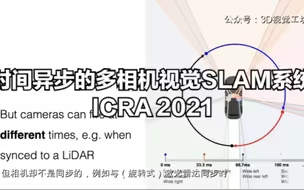
ICRA2021,时间异步的多相机视觉SLAM系统,效果大幅提升,更符合实际情况(代码即将开源)
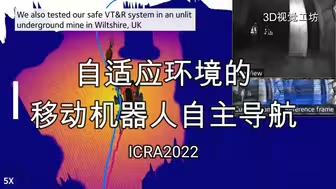
ICRA2022:自适应环境的移动机器人自主导航
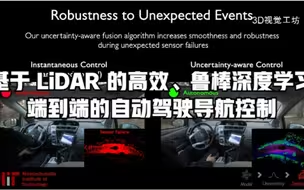
ICRA2021,基于 LiDAR 的高效、鲁棒深度学习端到端的自动驾驶导航控制,大幅减少接管次数(代码开源)
帅呆了,可拆卸、变形、协同工作的新型Swarm 3D打印机器人
四元数基础
[ICRA2022]谷歌机器人子公司Intrinsic最新开源机器人抓取论文
四旋翼模型与控制基础
最新!无人机动态环境感知&规划新思路!
最新CVPR2021论文,用于帧插值的压缩驱动网络设计
Go!最新NeRF和SLAM结合开源方案!超越NICE-SLAM和DROID-SLAM!
[IROS2021] 使用镜面反射减少机器人视觉系统中的遮挡
CVPR2021最新论文,基于内关联性的单目实时全身动作捕获,速率达到25帧/秒
ICRA 2020,MIT机器狗在杂乱地形下能跑、能跳,大幅增强机械狗的地形通过能力!
端到端!首个开源视觉Transformer四旋翼控制避障方案!
PID控制器原理讲解
最新ICCV2021论文,基于分层内存匹配网络的视频对象分割
四旋翼模型简介-御风250模型
四旋翼无人机-PX4控制算法代码
IEEE IROS 2019,最新无人机飞控算法,在未知环境下的无人机快速安全航迹规划(代码开源)
四旋翼无人机-实际飞行测试
四旋翼无人机-SO3姿态控制原理
ICRA2021:基于多模态地标统一跟踪的紧耦合激光-视觉-惯性里程计
ICCV2021,浙大工作!遮挡环境下基于学习的未知空间占用分布预测,机器人运动轨迹更加光滑、安全!
ICRA2024 牛津提出NeRF融合激光雷达SLAM的大场景重建
公开课|基于PX4的四旋翼建模与控制
最新CVPR2020论文:用AI还原3D照片(Facebook研究,效果惊艳,代码开源!)
最新ICRA2020论文:视觉里程计回顾:什么特征应该被学习?
有了这个算法,你的无人机再也不怕撞鸟了,IROS2021,事件相机+目标检测+轨迹预测!
[IROS2021] 通过触觉感知物体重心,提升机器人抓取稳定性
ICRA23开源 动态环境下高鲁棒的雷达MOT SLAM!
中山大学最新提出 基于LiDAR-测距-惯性融合的机器人群体协同SLAM系统