V
主页
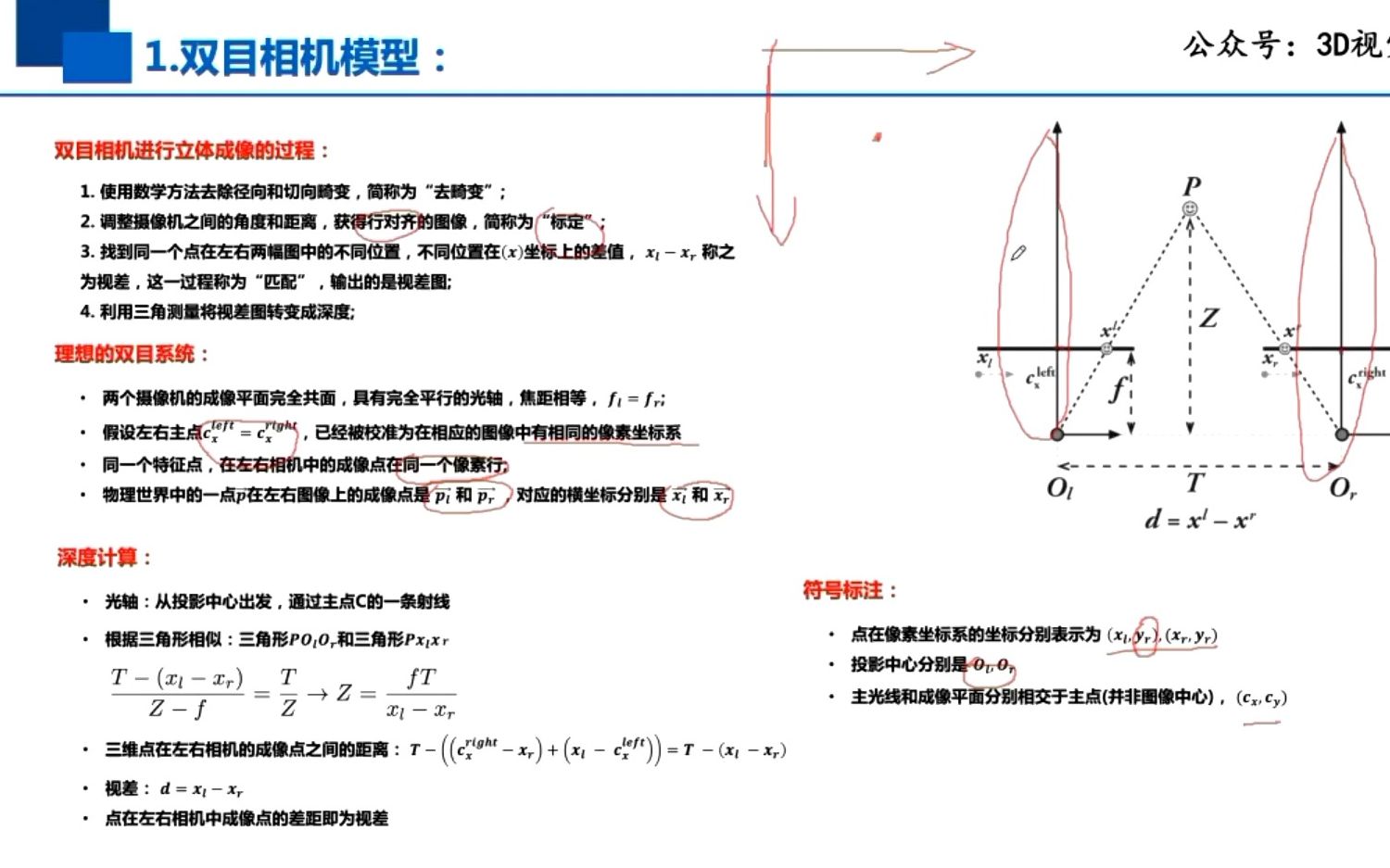
双目相机标定
发布人
双目相机标定(上篇) 大纲: 1、双目相机模型 2、双目相机标定 1)对极几何 2)本征矩阵和基本矩阵 3)本征矩阵和基本矩阵推导 3、立体校正 1)双目标定 2)立体校正 3)校正映射 主讲老师: 韦恩,研究生毕业于某985高校,曾在小米、平安科技、创新工厂等多个公司任职,有丰富的算法工作经验,在天池、kaggle等国内算法比赛中获得TOP。 相机模型与标定系统课程(单目+双目+鱼眼+深度相机)课程主讲老师:https://ebzbf.xet.tech/s/3E00RW
打开封面
下载高清视频
观看高清视频
视频下载器
从零搭建一套结构光3D重建系统 [理论+源码+实践]
相机标定的基本原理与经验分享
绪论|单目相机标定理论及张正友标定法(上篇)
RA-L 2020:无需专门标定板或视图对齐的相机-激光雷达的校准方法
Open3D与点云处理简介(公开课)
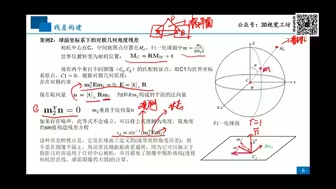
四元数基础
北交博士主讲:深度学习驱动下的相机标定技术发展(上篇)
无需标定板,高分辨率LiDAR和相机的像素级外部自标定,代码开源
自动驾驶实战课之多相机间的同步实战
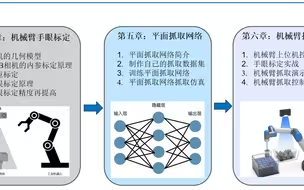
国内首个面向具身智能方向的理论与实战系统课程
无人机|PID算法详解与实战(上)
点云3D深度学习模型与实践
激光-视觉-IMU-GPS融合SLAM系列课程-传感器介绍与代表性SLAM解析
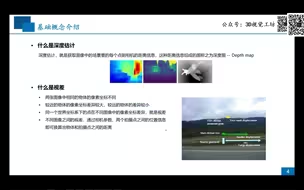
深度相机概述
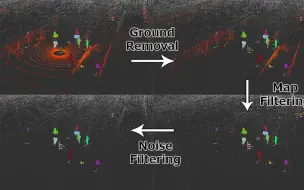
ICRA23开源 动态环境下高鲁棒的雷达MOT SLAM!
【3D视觉工坊】第八期公开课:立体视觉之立体匹配理论与实战
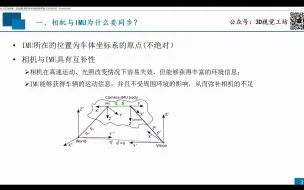
自动驾驶实战课之相机与IMU间的同步实战
这绝对是质量最高的单目深度估计开源方案!
四旋翼模型与控制基础
自动驾驶中多个小视场固态激光雷达不依赖参照物的外参标定(代码即将开源)
机械臂抓取-开发环境搭建
最新!无人机动态环境感知&规划新思路!
BEV与Occupancy网络的全景解析与实战
ORB-SLAM3基本原理与系统架构
自动驾驶中实战课之Lidar与IMU的同步实战
光学3D测量技术原理及应用
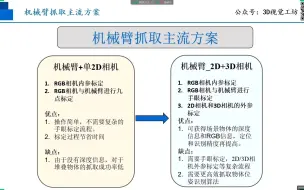
机械臂抓取简介
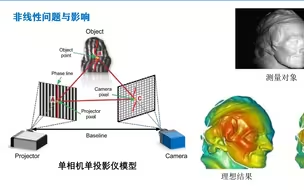
结构光的非线性问题与校正
四旋翼飞行器:算法与实战
[ICCV2021] DSEC:用于驾驶场景的双目事件相机数据集
极快跟踪一切!DOT:无惧遮挡!
高速结构光三维面形测量方法
三维点云系列视频——第一章绪论
PID控制器原理讲解
四旋翼无人机-ADRC整体介绍
软硬件代码均开源!多激光雷达的协同定位建图及在线外参自标定
小白如何手写g2o优化? 残差构建、雅克比推导、优化函数
单目深度估计绪论
如何高效学习单目深度估计?
CVPR2024开源NetTrack:跟踪高动态物体!