V
主页
京东 11.11 红包
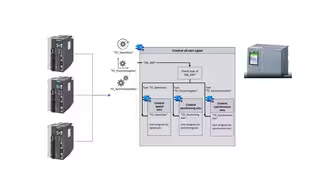
7-3工业机器人控制系统方案-基于PLC
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
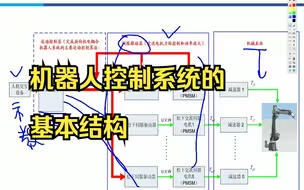
7-2机器人控制系统的基本结构
工业机器人组成
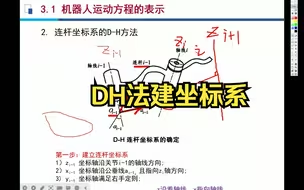
3-3DH法建坐标系
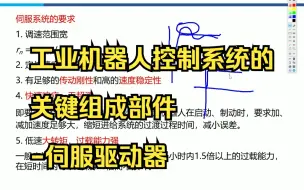
7-7工业机器人控制系统的关键组成部件-伺服驱动器
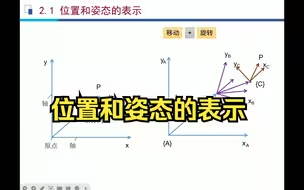
2-1位置和姿态的表示
7-6工业机器人控制系统的关键组成部件-电机
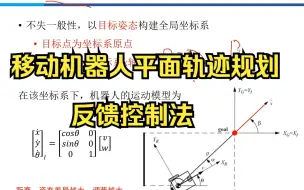
4-36移动机器人平面运动轨迹规划方法-反馈控制法
7-8工业机器人控制系统的关键组成部件-示教器及其他
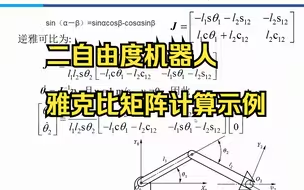
4-3二自由度机器人雅克比矩阵计算示例
分散控制系统DCS是个啥
08-DCS基本的系统结构
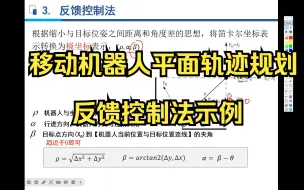
4-37移动机器人平面运动轨迹规划方法-反馈控制法示例1
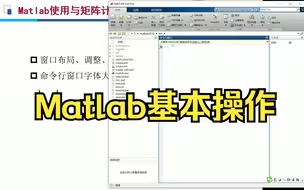
2-Matlab基本操作
西门子PLC飞剪--------五次多项式
4-1机器人速度雅可比矩阵
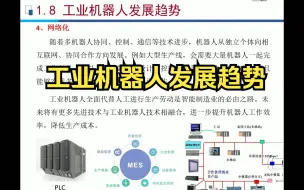
1-9工业机器人发展趋势
串口通讯的工作原理是什么?浅析串口协议的三层结构
3-2自主移动机器人-轮子的类型
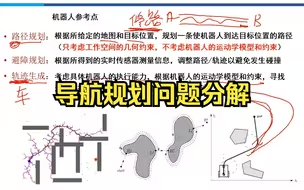
4-2导航规划问题分解
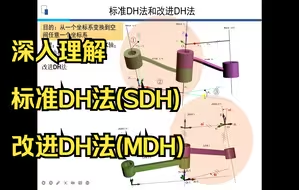
深入理解标准DH法(SDH)和改进DH法(MDH)
55-Coppeliasim与Matlab连接
还有谁看不明白plc控制柜?小成在现场给大家讲明白
4-27基本一维轨迹规划-5阶
2-00软件定义
多个机器人使用相同的控制器程序
学了plc如何做第一个工控项目?从需求分析到项目验收,项目全过程讲解!
4-10机器人的静力分析
【PLC毕业设计】基于PLC的自动洗车机控制系统设计
西门子DB_ANY 多轴控制功能块封装过程(上)
6-3关节空间的轨迹规划
49.SCL语言1
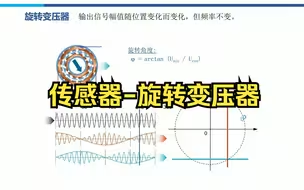
8-4传感器-旋转变压器
3-0机器人模型及连杆
1.20 如何使用 PLC 变量表
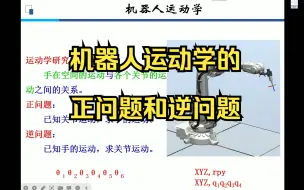
3-1正问题和逆问题
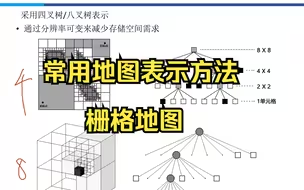
5-4常用地图表示方法-栅格地图
PLC打点接线很简单
5-2常用环境感知传感器
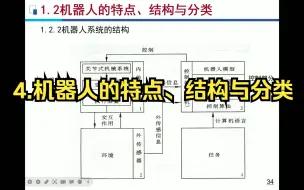
4.机器人的特点、结构与分类
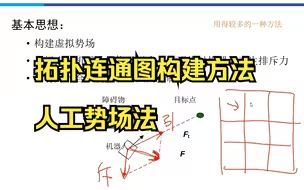
4-8拓扑连通图构建方法-人工势场法