V
主页
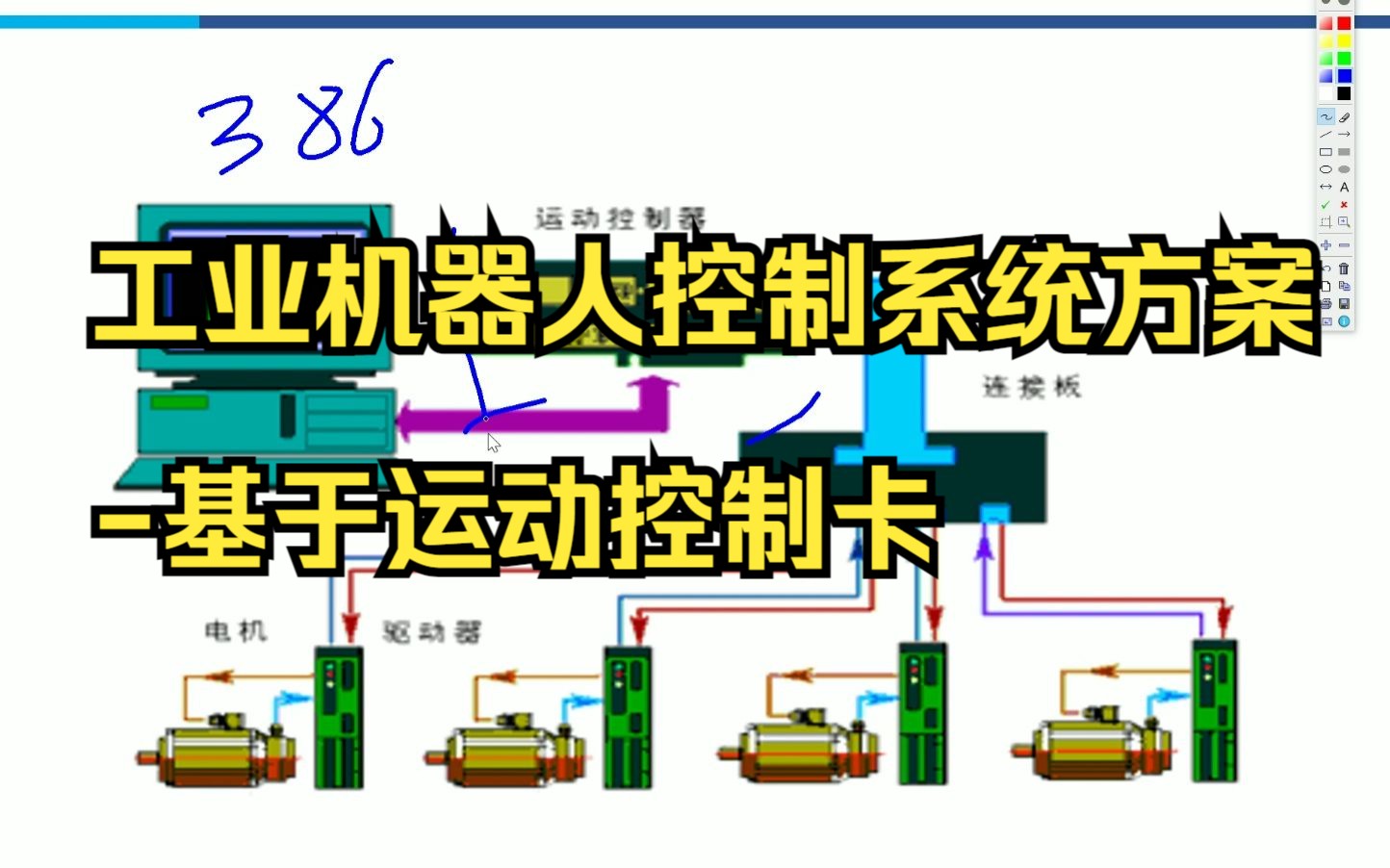
7-4工业机器人控制系统方案-基于运动控制卡
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
7-5工业机器人控制系统方案-基于PC
7-6工业机器人控制系统的关键组成部件-电机
7-7工业机器人控制系统的关键组成部件-伺服驱动器
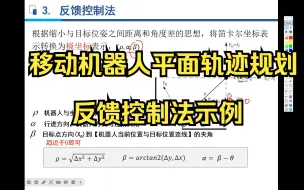
4-37移动机器人平面运动轨迹规划方法-反馈控制法示例1
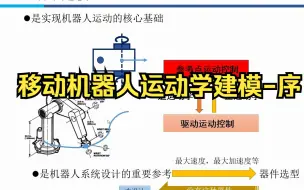
3-1移动机器人运动学建模-序
多个机器人使用相同的控制器程序
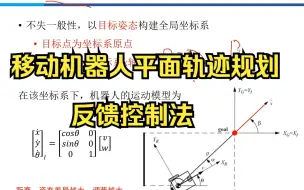
4-36移动机器人平面运动轨迹规划方法-反馈控制法
3-4自主移动机器人-轮式移动机器人运动学建模主要方法及分析假设条件
3-0机器人模型及连杆
5.工业机器人主要技术参数
3-17三自由度机器人Matlab机器人工具箱运动学jtraj关节空间规划及subplot二维曲线
西门子MODBUS 通讯地址说明-(粉丝解惑)
3-7运动合成作用建模-四轮差动底盘(机器人)
3-3自主移动机器人-轮子的排布
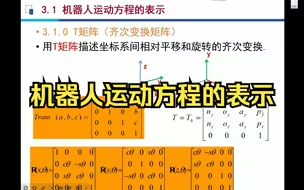
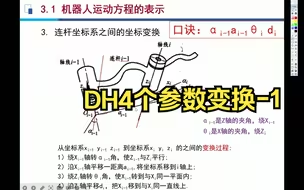
3-2机器人运动方程的表示
3-19六自由度机器人Matlab机器人工具箱建模
2-00软件定义
西门子PROFINET入门到精通
1-10如何学好机器人技术
4-5机器人雅克比矩阵的建立
3-6DH法4个参数变换-1
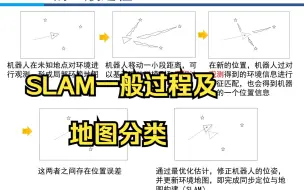
7-4SLAM一般过程及地图分类
3-21六自由度机器人Matlab机器人工具箱运动学正解robot.fkine
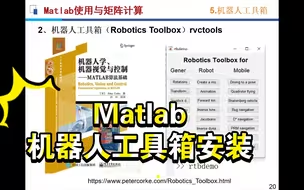
matlab机器人工具箱安装
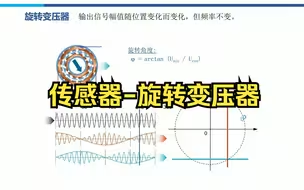
8-4传感器-旋转变压器
3-25自主移动机器人的可移动度-基于作用分析
4-1移动机器人导航规划
实例 vrep.coppeliasim4轮差动小车控制
工具坐标系标定及同步
1-2初识移动机器人
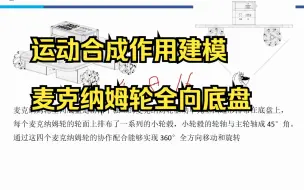
3-10自主移动机器人-运动合成作用建模-麦克纳姆轮全向底盘(机器人)
基于西门子PLC的十字滑台控制系统(含报告、io表、PLC接线图、主电路)
08-DCS基本的系统结构
4-11机器人动力学简介
2024全球十大人形机器人:中国机器人强势崛起!
4-3路径规划
6-6关节空间的高阶多项式插值
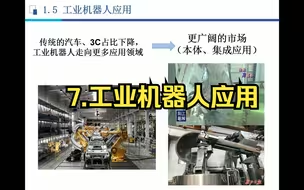
7.工业机器人应用
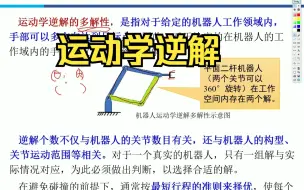
3-11运动学逆解
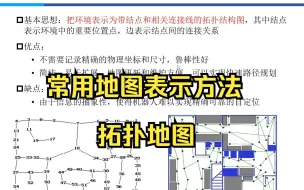
5-6常用地图表示方法-拓扑地图