V
主页
京东 11.11 红包
控制之美,动量轮倒立摆仿真视频
发布人
详细见 【[开源]让我真正领悟到控制的美——复杂多自由度,多任务控制案例,ijrr文章解读与仿真(上)-哔哩哔哩】 https://b23.tv/BwDiKBz 链接:https://pan.baidu.com/s/142635rCpikwt6DbvoenWjw 提取码:rzrn
打开封面
下载高清视频
观看高清视频
视频下载器
[机器人实践]基于mpc控制的carsim无人驾驶的仿真(翻老照片,找到几年前的仿真)
控制美女
常用到的线性化,加一个状态反馈控制例子
[开源]让我真正领悟到控制的美——复杂多自由度,多任务控制案例,ijrr文章解读与仿真(上)
初音未来被附身控制
[动漫催眠]少女被捆绑play,然后被催眠
【原神·恶堕】神里绫华被暗黑荧洗脑控制,变成乳胶人偶
控制实践-simulink仿真在控制的应用
[开源]让我真正领悟到控制的美——复杂多自由度,多任务控制案例,ijrr文章解读与仿真(下)
机器人控制,自动控制的本质,把握本质才能解决问题的
机器人控制前言,不要再花时间调参数了,理论结合实践才能出产品
开源库,4款人形机器人MPC控制的开源库
[动漫催眠]两位女主被反派控制成手下
机器人控制论文里常见的矩阵微分
【经验】机器人入门3--就业情况
消除稳态误差,积分控制,案例及仿真
机器人控制,特征根与系统稳定性
皮物
【开源软件】MPC控制,有机械狗、机器人、机械臂、倒立摆的模型,非常方便大家学习控制和机器人技术的,推荐给大家使用
写了一个人形机器人仿真,适用5或者6自由度的腿形
经验|研究机器人,不要面面俱到
【原神·附身】芭拉拉被罗莎莉亚夺舍控制
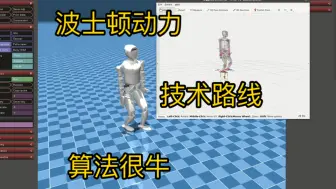
终于走上波士顿动力的技术路线了,算法很强,软件很难调。ocs2质心动力学MPC+WBC,6自由度的腿也调好了,加上了碰撞约束,参数还没细调,能够行走1m/s多。
人形机器人,强化学习sim 2 sim,humanoid gym 训练方法
经验|机器人开发怎么 “ 高效” 调参数,大家都有痛苦的调参经历
机器人控制,微分方程、传递函数及积分控制
原神皮化 安柏变身人偶皮套
控制18
1.反步法的基本原理及其应用设计
【开源软件-安装篇】MPC控制,有机械狗、机器人、机械臂、倒立摆的模型,非常方便大家学习控制和机器人技术,推荐给大家使用
迷惑控制-光波控制
人模人样----为了让人形机器人走的更像人,设计了一些机器人轨迹,目前只有下半身,展示的是轨迹的可视化
经验|做技术,确定方向,少走弯路
体验Isaac sim4.2中的人形机器人示例
【镜像开源】pinocchio、crocoddyl 可视化工具,镜像里已经安装好了,链接见简介
非线性系统实现全局稳定,反馈线性化
运控记录 | 使用ocs2框架,实现单腿六自由度人形机器人Hi的行走
最高速度跑到3m/s,ocs2质心动力学
【经验】机器人入门系列1--个人经历
《ROS 2机器人开发从入门到实践》6.4.4 使用两轮差速插件控制机器人