V
主页
【镜像开源】pinocchio、crocoddyl 可视化工具,镜像里已经安装好了,链接见简介
发布人
docker 镜像 安装了Pinocchio 和 crocoddyl 而且,还有humanoid gym中的XBot,强化学习参考估计的可视化的代码。 在容器/home/fdd中有icub的可视化python程序 下载地址,记得容器先解压出tar文件,在进行docker load 链接:https://pan.baidu.com/s/1F4I98KBNce7hPTub6hAQKA?pwd=szrw 提取码:szrw
打开封面
下载高清视频
观看高清视频
视频下载器
【LeRobot】中文字幕|Diffusion Policy: LeRobot Research Presentation 2 by Cheng Chi
AI下班前的幻想,这个世界终于癫成我们想要的样子了
细思极恐!这个赛博忠臣可不是玩笑!
耗时一个月,终于把人形机器人技术给突破了,为了积攒创业资金,准备开通咨询和技术合作,有需要可以联系我
从地产转行到自动驾驶2年,那个当众发言会紧张发抖的女生上央视啦!
开源库,4款人形机器人MPC控制的开源库
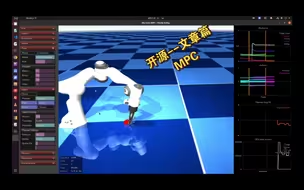
Whole body MPC 在线实时,只需要 15ms
暑假自己一个人在家belike
刚买的AI,才三岁,怪可爱的!
浙江大学第三代表情机器人“小壮”
论文速递 VMP:多功能运动先验用于鲁棒追踪物理角色上的运动
【LeRobot】中文字幕|OpenVLA: LeRobot Research Presentation 5 by Moo Jin Kim
我有一个梦想,做出刀剑神域爱丽丝那种机器人,刀剑爱丽丝,爱丽丝
波士顿动力人形机器人 Atlas | 强大的运动能力 夺回全球第一 | 宇树科技 波士顿动力回应你们了 | 机器人 | 智能机器人 | 人形机器人 |
[IROS 2024] 通过分布式优化加速腿式机器人的模型预测控制
[开源]让我真正领悟到控制的美——复杂多自由度,多任务控制案例,ijrr文章解读与仿真(上)
Adam:首款高仿生人形机器人的硬件架构设计
真刺激,清华有个博士生都要辍学加入了
AI生成视频失败案例,胆小警告
四足legged_control实机调试
“我说的是把机器人的腿打开!”
四足运动:用三种不同的方法在崎岖地形上行走
写了一个人形机器人仿真,适用5或者6自由度的腿形
灵巧手,进化!
说点大实话!为什么我认为机器人“灵巧手”落地很难?
这个号称世界最强的机器人,把马斯克的机器人都吓到了。
[开源]让我真正领悟到控制的美——复杂多自由度,多任务控制案例,ijrr文章解读与仿真(下)
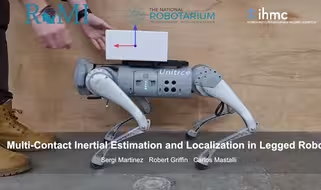
腿式机器人的多接触惯性估计与定位 [论文在审稿中]
多种步态稳定行走,丝滑切换转身站立
北漂打工机器人牛马
稚晖君上新啦!
[ IROS 24 ] DIABLO:完全由直接驱动关节组成的 6 自由度轮式双足机器人
DIY桌面人形机器人 行走逐渐稳定
UP主用AI生成《山海经》动画震惊网友,这次用的是国产模型
人形机器人强化学习训练方法,为什么腿是直着的?humanoid gym
人形机器人现场鲁棒性测试
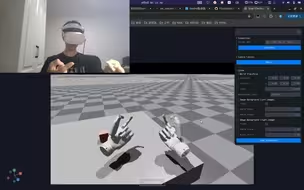
Quest2-OpenTeleVision-isaacgym
【开源软件-文章篇】MPC控制,有机械狗、机器人、机械臂、倒立摆的模型,非常方便大家学习控制和机器人技术,推荐给大家用
这个机器人看起来就不一般,可不太好惹。
crocoddyl足式接触机器人优化控制软件例子演示