V
主页
NVIDIA再斩CVPR冠军方案!Hydra-MDP:突破端到端多模态自动驾驶!
发布人
NVIDIA再斩CVPR冠军方案!Hydra-MDP:突破端到端多模态自动驾驶!#人工智能 #科技 #算法 #黑科技 #英伟达 #算法 #计算机 #自动驾驶 #端到端 在微信公众号「3DCV」回复:「原论文」,获取论文代码和链接,赶快学起来! 这篇文章提出了 Hydra-MDP,一种基于多教师知识蒸馏的端到端多模态规划框架。该框架利用人类驾驶和基于规则的规划师作为教师,通过多目标 Hydra 蒸馏来训练学生模型。学生模型拥有多头解码器,能够学习针对不同评估指标(如碰撞成本、可行驶区域合规性成本)的多样化轨迹候选。与传统的端到端规划方法相比,Hydra-MDP 能够更有效地学习环境对规划的影响,从而提高自动驾驶的安全性、效率、舒适性和交通规则遵守性。在 Navsim 挑战中,Hydra-MDP 获得了第一名,并在不同的驾驶环境和条件下表现出显著的泛化能力。
打开封面
下载高清视频
观看高清视频
视频下载器
比赛冠军方案!英伟达最新 | Hydra MDP:端到端多模态规划
CVPR'24开源 MASA万能匹配一切、跟踪一切!
107 FPS!开源!结合ICP和3D GS构建最快的稠密SLAM!
【熟】Vedal和Layna互相甩锅,吵得Neuro都无语了
CVPR'24 奔驰DualAD解耦动态和静态世界实现端到端驾驶!
CVPR2024开源NetTrack:跟踪高动态物体!
3DGS进化,高效高质量的GaussianPro来袭!
返老还童 AI版拜登与特朗普的总统大选辩论
闭环性能炸裂开源VADv2端到端矢量化自动驾驶新SOTA
CVPR'24 3D-GS再进化Scaffold-GS实时自适应视图渲染的未来
复杂驾驶中的人机交互!LMDrive:第一个基于LLM的闭环端到端自动驾驶!
CVPR24 最佳学生论文:实现3DGS新突破,任意尺度无锯齿渲染!三名华人学者参与!
3DGS进化?2DGS颠覆3D场景重建!
浙大&阿里:用于自动驾驶的大规模神经场景渲染 [AAAI2023]
减论:5分钟极减阅读CVPR24 best paper《Generative Image Dynamics》
可灵AI,姐弟。
最新!无人机动态环境感知&规划新思路!
2024年6月29日信息差
CVPR 2021,点云配准工作!循环多视图对齐网络的无监督表面点云配准!
无需 GPS:语义地图引领多机器人室内外探索
南洋理工大学开源F-LOAM:最为精确和快速的开源激光SLAM方案之一
CVPR2024 3D-GS再进化实时自适应视图渲染的未来!
[ICCV2021] DSEC:用于驾驶场景的双目事件相机数据集
端到端!首个开源视觉Transformer四旋翼控制避障方案!
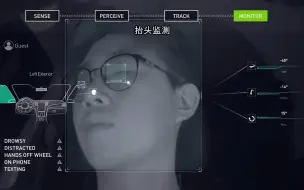
英伟达最新智能AI驾驶辅助座舱系统:NVIDIA DRIVE IX
迈向真实世界的一大步:4D-GS建模实时动态场景!
香港大学&南科大!通过基于模型的学习实现直接基于点的端到端机器人导航
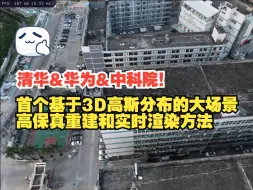
清华&华为&中科院!首个基于3D高斯分布的大场景高保真重建和实时渲染方法
这绝对是质量最高的单目深度估计开源方案!
CVPR最佳学生论文创作只需一个月到底是怎么做到的啊?!【附原文+代码】
CVPR'24开源 通过3D GS进行整体城市3D场景理解!
无需额外训练!SAMPro3D:零样本3D分割一切!
ai让祖国人梦想成真
CVPR2024全部奖项公布!华人学者夺最佳论文!Sora舵手火爆演讲成大型追星现场!-CVPR/人工智能/深度学习
YOLOV4用于道路交通口智能人流、车流监控
MIT最新突破!SplaTAM:实现高速SLAM与实时3D渲染的全新方法!
CVPR'24开源 ADA-Track端到端3D多目标跟踪最新SOTA!
MIT重磅开源!别再用COLMAP了!FlowMap给你最精确的SfM!
天秀之作!CVPR24满分带你解读神经场网络模型
谁他娘ai换脸换我啊?