V
主页
从相机运动和目标检测中获取深度(CVPR2021,代码开源)
发布人
https://www.youtube.com/watch?v=GruhbdJ2l7k 来自美国密西根大学和斯蒂文斯理工学院的工作,本文解决了在给定相机运动的情况下,学习估计被检测物体深度的问题,具体的方法是通过设计一个循环神经网络(DBox),使用边界框和未校准的相机运动的广义表示来估计对象的深度。具体的效果,请看视频!
打开封面
下载高清视频
观看高清视频
视频下载器
[CVPR2021] MonoRec:无需激光雷达,单相机实现三维场景的稠密重建,去除运动伪影,泛化性能好!代码开源!
CVPR2021,基于多视点鱼眼图像的实时球面扫描立体成像
CVPR2021,结构光低计算成本准确恢复分段平面场景
CVPR2021,FFB6D:用于6D位姿估计的全流双向融合网络,代码开源
CVPR2021,Time-lens:基于事件相机的视频插帧方法,效果顶尖,超越华为P40算法
CVPR2021论文,NEX:基于神经基扩展的实时视图合成,速度快1000倍,代码开源!
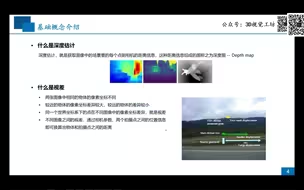
单目深度估计绪论
如何高效学习单目深度估计?
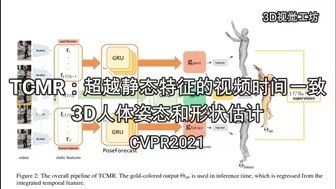
[CVPR2021] TCMR:超越静态特征的视频时间一致3D人体姿态估计
深度相机概述
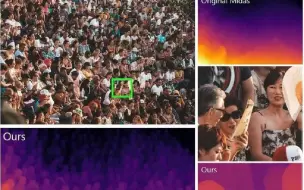
Talk|香港大学杨丽鹤:Depth Anything V2 - 更精细更鲁棒的单目深度估计基础模型
CVPR2024开源NetTrack:跟踪高动态物体!
Function4D: 从稀疏的消费级RGB-D相机中精确重建人体动作(CVPR2021)
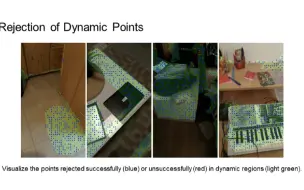
室内动态变化场景中的相机重定位(CVPR2021)
传统深度估计方法实战
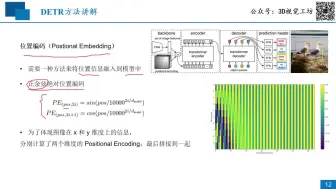
慕尼黑工业大学萌妹子开讲!DETR-如何用Transformer做目标检测?
香港大学工作!CVPR2022:事件相机的自动对焦
CVPR2022 基于深度学习的人体前景目标检测
最新CVPR2021论文,用于帧插值的压缩驱动网络设计
WACV2023:基于结构光的RGB事件相机(代码开源)
CVPR 2024开源 VSRD:无需LiDAR和标注使用2D渲染解决3D检测的新范式!
有了这个算法,你的无人机再也不怕撞鸟了,IROS2021,事件相机+目标检测+轨迹预测!
CVPR2021最新论文,基于内关联性的单目实时全身动作捕获,速率达到25帧/秒
单目无监督深度估计综述
CVPR 2021 HPS:无需外部传感器,大场景、长时间的动作捕获系统
无需标定板,高分辨率LiDAR和相机的像素级外部自标定,代码开源
最新ICRA2021论文,基于成像激光雷达的稳健位置识别,代码开源!
CVPR 2021,点云配准工作!循环多视图对齐网络的无监督表面点云配准!
ICCV2021,华为提出鲁棒无监督自适应目标检测方法
[CVPR2022] 能换全身发型、服装的Gan网络(代码开源)
WACV2023:只需4次示范,基于纯目标检测的机械臂学习拾取
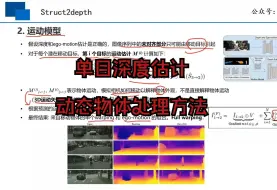
单目深度估|动态物体处理方法
浙大+商汤联合工作,LoFTR:利用transformers对稀疏纹理进行匹配(CVPR2021)
IROS 2021 | PTT-Net:基于Transformer的开源3D点云目标跟踪网络
NeurlPS 2023 扩散模型对光流和单目深度估计的惊人有效性!
IROS 2021,使用事件相机对电力线路进行巡查,线路寿命增加十倍!代码开源!
[CVPR2022] StyleMesh:室内 3D 场景重建的风格转移
[CVPR2022] 使用单幅彩色点投影的深度学习高光谱和深度重建
[ICRA2021] SDK:基于深度学习和显著性估计的点云关键点检测
[CVPR2022] ICG:融合区域和深度以实现无纹理对象的高效3D跟踪