V
主页
传统深度估计方法实战
发布人
课程地址:https://app0S6nfQRG6303.h5.xiaoeknow.com 一个专注3D视觉领域课程分享的平台!依托公众号3D视觉工坊与计算机视觉工坊。 课程主要包括:自动驾驶、SLAM、三维点云、三维重建、机械臂抓取与位姿估计、结构光等。
打开封面
下载高清视频
观看高清视频
视频下载器
Depth Anything!最强开源单目深度估计SOTA!
单目深度估计|连续帧方法实战课
这绝对是质量最高的单目深度估计开源方案!
速度提升10倍以上!Depth Anything V2更稳健、精细的单目深度估计
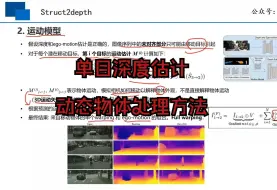
单目深度估|动态物体处理方法
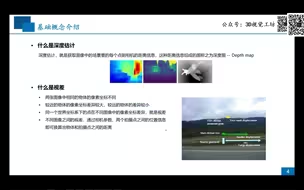
单目深度估计绪论
ECCV'24开源 | DoubleTake深度估计& 三维重建最强解决方案!
点云3D深度学习模型与实践
单目无监督深度估计综述
如何高效学习单目深度估计?
高速结构光三维面形测量方法
最详细!完整版【面向深度学习的无人驾驶实战】教程,全程干货,没有废话!!!(萝卜快跑/自动驾驶/人工智能)
如何进行三维重建?从单帧深度估计到完整模型重建
深度相机概述
无人机|PID算法详解与实战(上)
光学3D测量技术原理及应用
吊打ORB3!73Hz!南洋理工重磅开源AirSLAM:无惧复杂光照的超强点线视觉SLAM!
从零搭建一套结构光3D重建系统 [理论+源码+实践]
[CVPR2022] 阿里巴巴: 用于单目深度估计的神经窗口全连接CRF
双目相机标定基础及标定实战
CVPR2019论文:基于神经网络深度估计原理的单目RGB-D深度相机
107 FPS!开源!结合ICP和3D GS构建最快的稠密SLAM!
LightGlue:最强轻量级特征匹配?
Talk|香港大学杨丽鹤:Depth Anything V2 - 更精细更鲁棒的单目深度估计基础模型
无需额外训练!SAMPro3D:零样本3D分割一切!
MIT重磅开源!别再用COLMAP了!FlowMap给你最精确的SfM!
CVPR满分论文!即插即用的6D物体姿态估计大模型(BOP排行榜第一)
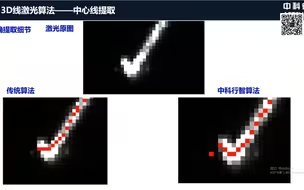
3D线激光相机检测技术解析与应用分享
太稳啦!Gaussian Splatting杀入6D物体位姿估计!
无人机-PID算法详解与实战
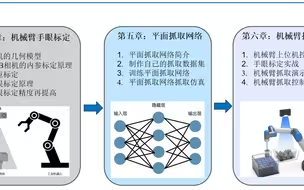
机械臂抓取-开发环境搭建
极快跟踪一切!DOT:无惧遮挡!
最新CVPR2020论文:Bi3D网络-通过多个二元分类立体估计深度(代码开源)
[ICRA2021] SDK:基于深度学习和显著性估计的点云关键点检测
NeurlPS 2023 扩散模型对光流和单目深度估计的惊人有效性!
大作业|激光-视觉-IMU-GPS融合SLAM算法
自动驾驶实战课之多相机间的同步实战
Occupancy的工程细节
国内首个面向具身智能方向的理论与实战系统课程
四元数基础