V
主页
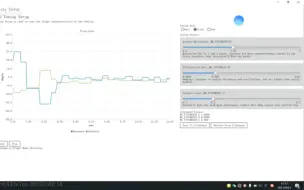
移植hybrid astar 20231022_180417 截取视频
发布人
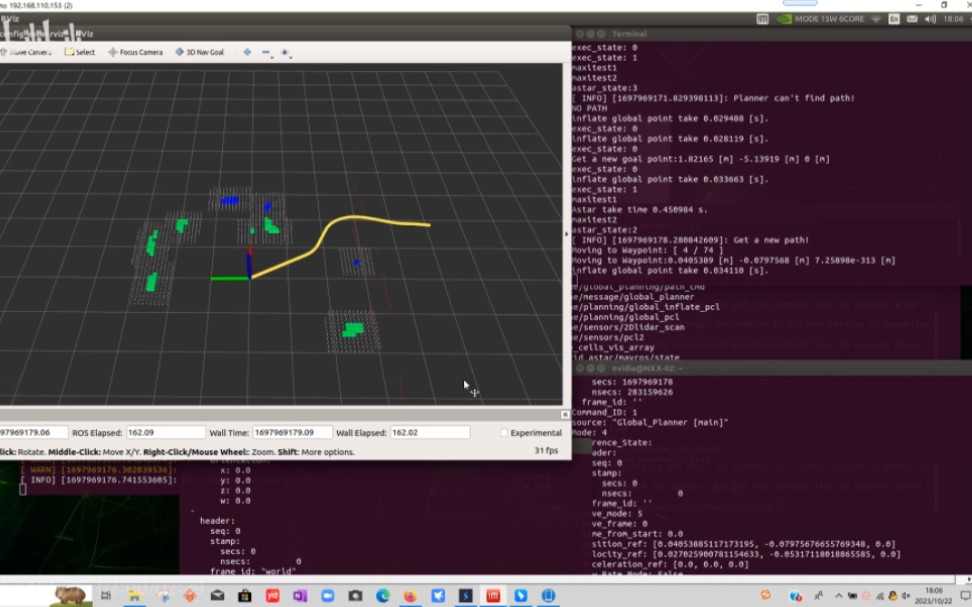
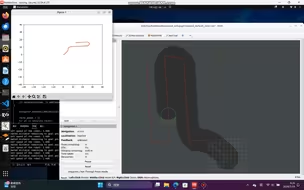
移植hybrid astar 20231022_180417 截取视频,基于思岚S1激光雷达运行的,可以规划出光滑路径,但还未实飞。 地图是T265+2D激光点云+octomap_server构建的八叉树地图。 https://gitee.com/maxibooksiyi/maxitest_ws/blob/multifunc_on_OrinNX3006/src/offboard_pkg/sh/hybrid_astar_2d.sh
打开封面
下载高清视频
观看高清视频
视频下载器
T265+2D激光点云+octomap_server构建八叉树地图+astar路径规划过走廊 20220605_152950 截取视频
把基于opencv4的vins-mono前端改为superpoint+光流 20230918_160125 截取视频
NX上静态跑通基于livox mid40的FASTLIO2+ego-planner 20220912_111358 截取视频
基于bag包跑港大的dyn_small_obs_avoidance 20230310_220441 截取视频
观看FASTLAB的一次飞行,挺稳的 20221027
跑CMU的far_planner 还是存在一些问题 屏幕录像 2024-02-29 10:42:24
把ego的plan_env模块单独取出订阅位姿和深度图构建自己可用的导航地图 20240315_091408 截取视频 截取合并
在笔记本Ubuntu上运行ManhattanSLAM(基于TUM数据集运行) 20220820_112233 截取视频
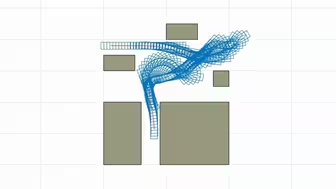
铰接式车辆hybrid A*泊车路径规划方法-(3)侧方库位泊入
用D435i跑PL-VINS屏幕录像 2022-03-05 22-19-01 截取视频
小车跑vinsgpu-ego VID_20221010_143409 截取视频
在湖州飞的vinscpu-ego 手动点目标点 20221029
在OrinNX上部署运行PlaneRecNet 对单幅图像进行深度估计和平面检测 20230810_150338 截取视频 截取合并
基于T265和D435i octomap_server功能包实现octomap增量式建图 20220428_095553 截取视频 截取合并
运行部署好的Structure-PLP-SLAM,实际还有些问题,起来运行不了多久就挂掉了20221007_004441 截取视频
路径跟踪 | 最优控制LQR算法实现(ROS C++/Python/Matlab)
小车cartographer+move_base VID_20230315_184023
基于livox mid 40运行loam-livox 20220906_221318 截取视频
十一届华南赛 (考古视频) WP_20160718_12_01_48_Pro
基于D435i跑RTABMAP 20230721_111623截取视频
跟他人学PX4的PID调参录屏 20210423_143805
快速流畅!人工智能ROS小车雷达导航、路径规划、虚拟仿真、slam导航算法
无人机轨迹规划经典算法ros/c++开源实现
把RTPL-VIO的前端由EDLines改为MLSD并在线跑起来 20230812_094048 截取视频
智能无人机课程 10 飞行日志分析与pid调参
aruco二维码降落原理与代码讲解及gazebo仿真演示 20240422_094842
六自由度机械臂+RRT算法路径规划避障Matlab程序
基于Bézier曲线和Reedsheep曲线扩展的RRT算法
半挂车混合A*路径规划大法
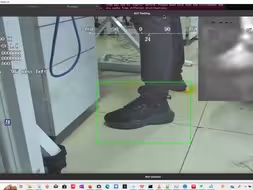
基于opencv实现先飞吊舱的KCF框选跟踪 20231110
嘉立创SMT BOM元件配单演示20201027_095109
s型路径ros2的navigation2 自动导航仿真
基于D435i跑RGBD的ORBSLAM3屏幕录像 2022-08-20 22-27-46
【机械臂运动规划】CoppeliaSim与Matlab的联合运动规划仿真
《JPS跳点搜索算法》比A*算法快百倍的JPS寻路算法是怎么实现的
vins飞8字 20221028
无需SLAM算法,直接生成Gazebo仿真环境对应的高质量真值地图的工具 pgm_map_creator,手把手逐步详细讲解安装部署和使用方法【开源】
人工势场法 APF 动态障碍物 apf 动态路径规划 Matlab 路径规划
六自由度机械臂路径规划+运动学正解+标准D-H参数法
基于T265或vins px4定点指点原理讲解与gazebo仿真演示20240329_122655