V
主页
自动驾驶行业中的BEV感知技术之美,上帝视角观摩感知技术
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
超越BEVFusion!DifFUSER:扩散模型杀入自动驾驶多任务(BEV分割+检测双SOTA)
自动驾驶主流感知范式:BEV
开着自动驾驶汽车的你能想到有多少种感知技术在为你保驾护航吗?
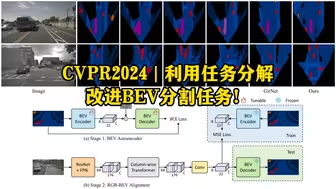
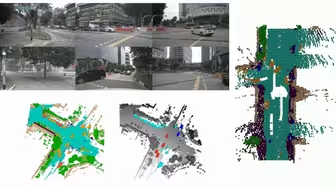
CVPR2024 | 利用任务分解改进BEV分割任务!
ECCV'24 | 从BEV到OSP:自动驾驶场景建模新趋势,提供更灵活精确的空间预测
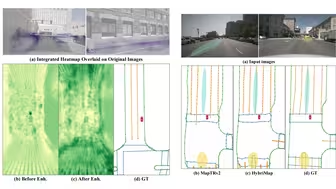
HybriMap:结合PV和BEV特征的高清地图构建技术,实现nuScenes数据集性能提升4%
全面评估BEV感知算法: RoboBEV基准测试与 鲁棒性增强策略探索,
你知道计算机是如何识别语音的吗?国外大神解释语音识别原理
IT圈最硬核的八大竞赛,每一个冠军都是面试最强有力的敲门砖
国内外“飞行汽车”对比,你更喜欢哪一款?
来自民间的30项关于特斯拉FSD v12版本 以上的实测,带你深度感受端到端 自动驾驶技术线路的优缺点
多模态信息感知的SLAM | 吴毅红
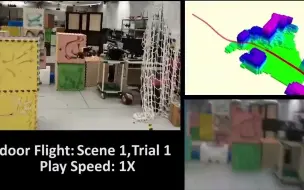
港科大最新工作:无人机快速飞行中智能鲁棒感知和轨迹规划策略
这就是为何学习人工智能必学c++的理由
三维重建入门到精通,30分钟教你学会运动恢复结构SFM
第十二期《智能无人机:从硬件到技术实战》
华为诺亚发布!MagicDrive3D适用于街景中的任意视图渲染的可控制的3D生成技术
浙大最新开源!HVOFusion:使用混合体素八叉树进行增量网格重建
清华大学孙富春教授团队 综述:触觉感知在机器人灵巧操作中的应用与进展
AR/VR 行业探讨以及SLAM从业职业规划 | 圆桌论坛
ICRA'24 | RGBManip:仅基于单目RGB相机的机器人自主环境感知和操纵,实现精准环境感知
10大与人工智能相关的<顶级会议>,哪些是你的投递首选?这些顶会论文与SCI论文相比如何呢?
端-云协同的视觉定位与重建及应用 | 章国锋
ECCV'24 | JHU提出无需SfM的X光3DGS技术: X-Gaussian,使得X射线新视图合成推理速度提升73倍!
大疆 CVPR 2024 | AFNet自动驾驶中单视图和多视图深度的自适应融合
基于深度学习的三维重建与位姿估计系统设计 | 孙佳明
极氪7X 不止于家庭SUV 更是!
自动驾驶公司招聘最看重什么?
LIO系统的改进及其在自动驾驶定位模块中的应用 | 高翔
图森未来在重卡自动驾驶的最新落地与实践 | 王乃岩
4位大佬浅谈自动驾驶行业的未来及发展
面向自动驾驶和盲人辅助的场景分割-杨恺伦/湖南大学副教授
(清华&英伟达)高保真度!DriveEnv-NeRF:基于NeRF搭建真实自动驾驶环境
PETR—作分享:基于位置编码的BEV感知范式
精品公开课 | 三维人体的感知、生成与驱动
MOT-CUP: 具有共形不确定性传播的 协同多目标跟踪,利用来自COD的不确定性量化以增强MOT性能
【面经分享】如何成为offer收割机?——移动机器人专场
200万内最好的飞行器来了! 小鹏汇天飞行汽车全解密 ,飞行器首次舱内体验感受如何?#飞行汽车#小鹏汽车#低空飞行器
SLAM在自动驾驶中的应用: AVP-SLAM和众包构图 & 非惯性系下VIO探索 | 秦通
CVPR24 最佳学生论文:实现3DGS新突破,任意尺度无锯齿渲染!三名华人学者参与!