V
主页
京东 11.11 红包
[CVPR 2021] 深圳市大数据研究院:根据文本描述进行三维物体定位
发布人
https://www.youtube.com/watch?v=38lTLptpQxs 由于重建后部分物体几何信息的缺失,在RGBD图片上进行三维文本视觉定位是具有挑战性的任务。本文提出了一个自下而上的方法来解决这一问题。首先在底层融合语言和视觉特征,以生成一个热图来粗略地定位 RGBD 图像中的相关区域。然后基于热图进行自适应特征学习,并与另一个视觉语言融合执行对象级匹配,以最终确定所定位的对象。实验表明,该方法在ScanRefer 、SUNRefer 数据集上都大大优于以前的方法(11.2% 和 15
打开封面
下载高清视频
观看高清视频
视频下载器
港大火星实验室:在大规模杂乱的3D环境中进行快速无人机探索方案
香港大学发表超强无人机实时避障算法:以后无人机再也不怕撞了!
透彻剖析室内外激光SLAM算法与实战系列课程-室内激光SLAM建图定位实战
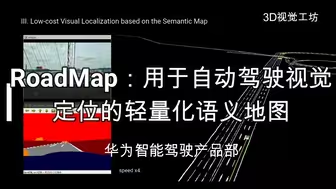
华为最新工作:RoadMap:用于自动驾驶视觉定位的轻量化语义地图
NVIDIA再斩CVPR冠军方案!Hydra-MDP:突破端到端多模态自动驾驶!
大作业|激光-视觉-IMU-GPS融合SLAM算法
CVPR 2021,点云配准工作!循环多视图对齐网络的无监督表面点云配准!
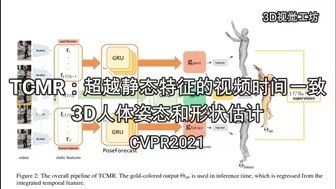
[CVPR2021] TCMR:超越静态特征的视频时间一致3D人体姿态估计
透彻剖析室内外激光SLAM算法与实战系列课程-激光SLAM传感器基本原理
视觉快速定位与实时稠密简图简介
透彻剖析室内外激光SLAM算法与实战系列课程-激光SLAM精讲(下)
Kivicube AR平台:低代码可视化编辑即可完成SLAM场景制作
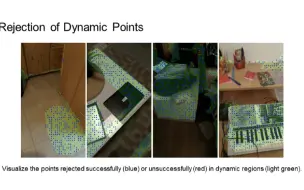
室内动态变化场景中的相机重定位(CVPR2021)
CVPR满分论文!即插即用的6D物体姿态估计大模型(BOP排行榜第一)
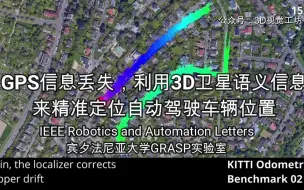
GPS信息丢失,利用3D语义信息来精准定位自动驾驶车辆位置,精度达到10m!
多传感器融合SLAM松耦合与紧耦合
高斯抛雪球SLAM
ECCV'24开源 完虐COLMAP!百倍加速!ACEZero:全新SfM革新三维重建!
别再用SuGaR了!重磅开源SA-GS:重新定位最新大场景3D重建SOTA!
CVPR2024开源NetTrack:跟踪高动态物体!
[非完整版]透彻剖析室内外激光SLAM算法与实战系列课程-激光SLAM后端优化方法
107 FPS!开源!结合ICP和3D GS构建最快的稠密SLAM!
CVPR'24开源 | 吊打一切VINS!又快又好的视觉惯性导航系统!
三维空间扫描仪 高效率重建古建筑
浙大+商汤联合工作,LoFTR:利用transformers对稀疏纹理进行匹配(CVPR2021)
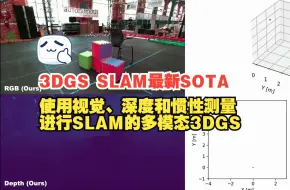
3DGS SLAM最新SOTA | 使用视觉、深度和惯性测量进行SLAM的多模态3DGS
如何轻松拿捏LIO-SAM-数学基础篇
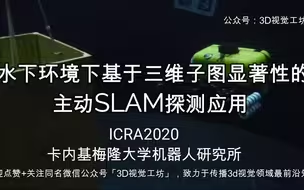
ICRA2020,卡内基梅隆大学机器人研究所,基于三维子图显著性的水下环境主动SLAM探测应用
CVPR2021论文,NEX:基于神经基扩展的实时视图合成,速度快1000倍,代码开源!
最新CVPR2021论文,用于帧插值的压缩驱动网络设计
CVPR&NeurIPS2024开源 | 迈向通用可泛化的自动驾驶世界模型
基于单张图片的3D人脸重建概述
PID控制器原理讲解
原理代码讲解|选择性特征融合 CVPR 缓解细节特征丢失 图像领域通用【V1代码讲解035】
基于NVIDIA Isaac Sim和LIO-SAM的激光SLAM demo
Fast LIVO 硬同步过程释疑
CVPR'24 Symphonies:基于实例级建模的3D场景占用
机器人多传感器融合
SLAM算法为什么需要内存管理机制
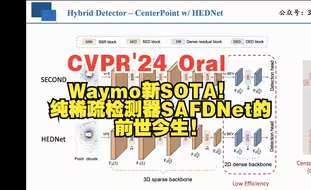
CVPR'24 Oral Waymo新SOTA!纯稀疏检测器SAFDNet的前世今生!-上篇