V
主页
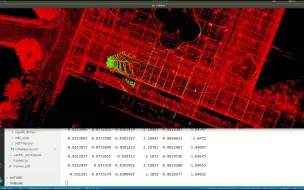
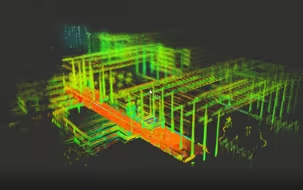
(开源)LINS-LIVOX: 实时轻量的Livox激光雷达与IMU融合SLAM算法,可应用与自动驾驶汽车高精度测绘。
发布人
参考LINS的传感器融合算法思路,LINS-LIVOX专门针对Livox-horizon固态雷达开发了一种基于迭代误差状态卡尔曼滤波器(IESKF)的LiDAR-IMU融合算法。 开源代码链接:https://github.com/GDUT-Kyle/LINS-LIVOX.git
打开封面
下载高清视频
观看高清视频
视频下载器
Faster-LIO-SAM:针对Livox雷达的快速且精确的激光-惯导紧耦合SLAM系统
LiDAR+IMU+间歇GNSS+回环检测的融合定位与建图
[开源] FASTER-LIO-SAM:一种花里胡哨的Livox LiDAR+IMU的轻量化SLAM系统
成长的里程碑-我们自己设计并且搭建的一套自动驾驶系统
(开源)LeGO_Livox:轻量化的Livox-SLAM系统
[开源] 用于多个Livox激光雷达的外参自动标定系统
Livox Mid70+IMU紧耦合实现的手持SLAM测绘设备
【开源】也许会是目前功能最多的激光SLAM(Lidar SLAM)
FASTER-LIO-SAM(青春靓丽五颜六色灿烂缤纷版)
LeGO_Livox:轻量化的Livox-SLAM系统
最近无聊花了几天给小狗狗按了个2D雷达,憨憨地自动导航起来
激光雷达实时场景三维重构.👏
激光slam相对坐标精度,科力达slam车库室内操作
ORB-SLAM3有必要学吗
【开源】低成本DIY自动驾驶小车
DOM 60适用于机器人的3D激光雷达
PID雷达自动控制定位算法(定位精度正负3厘米)
嵌入式linux项目,复刻IPhone相机测距功能 ,单目相机+IMU,Vins-mono slam,应用开发,驱动,RK3568,AR
这几年,激光雷达发展迅速,成本也下降许多,性价比就上来了
r3live语义建图
大疆livox-mid360室外定位
芯探科技纯固态Flash激光雷达XT-S240Pro室外测试可达15米,有效抑制室外强光达100Klux,灰尘滤波算法及杂散点去除
基于搭建的仿真Livox mid360雷达与仿真环境实现LeGO-LOAM
【SLAM】【VIO】双目视觉 +超强大的三维感知力 VIOBOT 【性能测试——高精度】“实测”
[TIV 2024] MIAS-LCEC
Swarm-LIO2: 适用于无人机集群的分布式、高效激光雷达惯性里程计
激光slam在林业树冠,胸径,冠幅,株树等方面应用,激光雷达扫描
CVPR'24开源 | 吊打一切VINS!又快又好的视觉惯性导航系统!
LSD-SLAM系统框架解读
港大MARS实验室发布! Fast-LiVO2:快速、直接的激光雷达惯性视觉里程计
地下车库自动泊车——依靠激光雷达测距的刹停测试
[IROS 2024] AS-LIO: 空间交叠度指导的自适应滑窗激光惯性里程计
【SLAM】【VIO】双目视觉+超强三维感知力【室内复杂空间内——同步定位.建图.导航】“实测”
走进高校|激光雷达测绘技术——南京理工大学3
欧司朗推出8通道915nm脉冲激光器,开创激光雷达应用新时代
TRLO: An Efficient LiDAR Odometry with 3D Dynamic Object Tracking and Removal
【SLAM】【VIO】双目视觉+超强大的三维感知力+tof 相机 【功能演示+实时重建】“实测”
什么是三角测距?TOF测距?激光雷达怎么精准测距的?
ROS机器人基于gmapping的slam自动导航建图!
存档毕设