V
主页
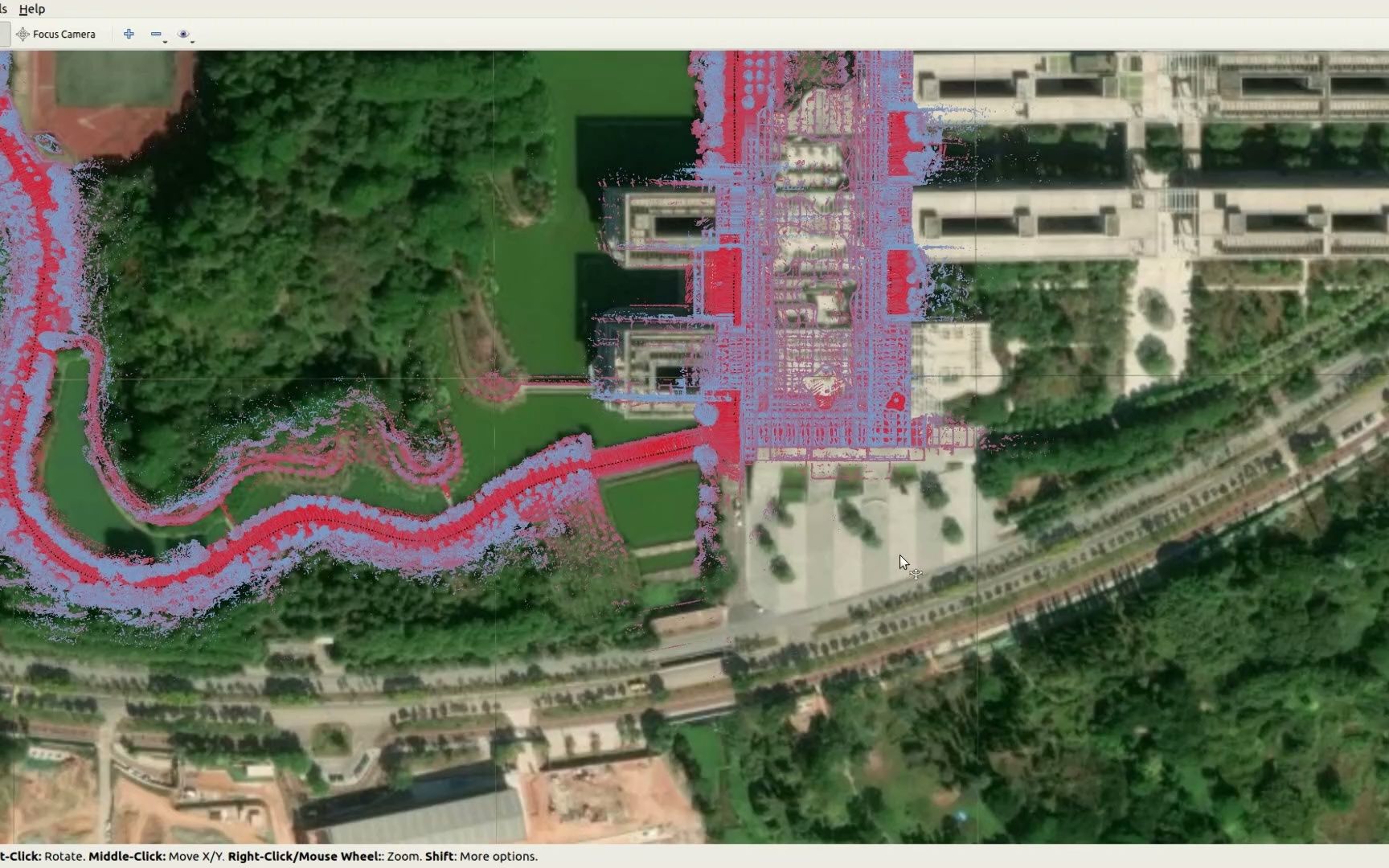
LiDAR+IMU+间歇GNSS+回环检测的融合定位与建图
发布人
LiDAR+IMU+间歇GNSS+回环检测的融合定位与建图,LiDAR和IMU在前端进行了紧耦合,后端使用ISAM2融合间歇性的GNSS数据,我们设计了一种基于惯导预积分理论的GNSS异常检测算法,可以检测出当前GNSS信号的情况并且进行融合修复,回环检测部分使用了基于LiDAR特征描述子的全局搜索方法。该系统在广东工业大学大学城校区进行实车测试。
打开封面
下载高清视频
观看高清视频
视频下载器
(开源)LINS-LIVOX: 实时轻量的Livox激光雷达与IMU融合SLAM算法,可应用与自动驾驶汽车高精度测绘。
[开源] FASTER-LIO-SAM:一种花里胡哨的Livox LiDAR+IMU的轻量化SLAM系统
成长的里程碑-我们自己设计并且搭建的一套自动驾驶系统
Faster-LIO-SAM:针对Livox雷达的快速且精确的激光-惯导紧耦合SLAM系统
FASTER-LIO-SAM(青春靓丽五颜六色灿烂缤纷版)
(开源)LeGO_Livox:轻量化的Livox-SLAM系统
Livox Mid70+IMU紧耦合实现的手持SLAM测绘设备
【SLAM】【VIO】双目视觉+超强大的三维感知能力【应用场景——办公室内】“定位&导航规划”“实测”【传感器】
[开源] 用于多个Livox激光雷达的外参自动标定系统
【开源】也许会是目前功能最多的激光SLAM(Lidar SLAM)
【SLAM】【VIO】双目视觉+超强三维感知力【室内复杂空间内——同步定位.建图.导航】“实测”
LeGO_Livox:轻量化的Livox-SLAM系统
r3live语义建图
最近无聊花了几天给小狗狗按了个2D雷达,憨憨地自动导航起来
ORB-SLAM3有必要学吗
ROS2自动驾驶|边做边学(二)地图与定位
大疆livox-mid360定位
【SLAM】【VIO】双目视觉+超强大的三维感知【室外高速工作场景】“实测”
[IROS 2024] AS-LIO: 空间交叠度指导的自适应滑窗激光惯性里程计
ROS机器人基于gmapping的slam自动导航建图!
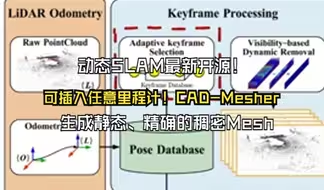
动态SLAM最新开源!可插入任意里程计!CAD-Mesher:生成静态、精确的稠密Mesh!
阿木SU17在无GPS弱光环境下依靠四目SLAM定位飞行展示
IGE-LIO:充分利用强度信息克服激光退化场景下的定位精度
CAD-Mesher: A Convenient, Accurate, Dense Mesh-based Mapping Module in SLAM for
【SLAM】【VIO】双目视觉 +超强大的三维感知力 VIOBOT 【性能测试——高精度】“实测”
【SLAM】【VIO】双目视觉+超强大的三维感知力+tof 相机 【功能演示+实时重建】“实测”
ECCV'24 Oral 满分论文 | SpikeYOLO:脉冲神经网络新进展,引领高能低耗目标检测新纪元
滑铁卢大学发布! 迈向实时的高斯平滑:通过光度SLAM加速3DGS
带 SLAM 和 Nevegation2 的 ROS2
【小白教程】使用 PSMNet 估计视差和计算双目深度,并映射到 3D 点云
【SLAM-2024】第五届全国SLAM技术论坛-浙江大学-高飞-自主飞行集群的感知与定位
秋招迫在眉睫!如何快速上手企业级CV项目?跟着这套教程三小时掌握SLAM算法及其应用,简直不要太好懂!
嵌入式linux项目,复刻IPhone相机测距功能 ,单目相机+IMU,Vins-mono slam,应用开发,驱动,RK3568,AR
【SLAM】【VIO】双目视觉+超强三维感知力【功能演示——半稠密点云】“实测”
大疆livox-mid360室外定位
套件教程-FAST LIO2之点云建图
【C++面试100问】第九十七问:map和set区别是什么,底层实现是什么
这才是科研人该学的!一口气学完自动驾驶八大算法-环境感知、目标检测、语义分割、强化学习、决策与控制算法!原理到实战,太通俗易懂了!机器学习|深度学习|计算机视觉
【毕设-大作业01】-自动驾驶环境感知与辅助-纯视觉方案
【SLAM】【VIO】双目视觉 +超强大的三维感知力 VIOBOT【功能演示——地表爬纹】“实测”