V
主页
UCSD 机器人讲座 —— 人形机器人的关键技术 + 基于模型 VS 学习的控制
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
斯坦福开源 - 机器人技能学习 通用接口UMI - 机械夹爪装配教程
NVIDIA Isaac 讲座 —— 使用 ROS 2 控制自主移动机器人
MIT 机器人讲座 —— MuJoCo MPC (MJPC) 介绍
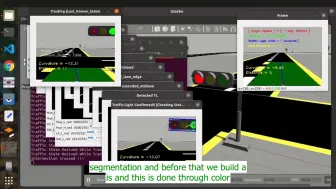
UIUC 机器人讲座 —— 机器人学习:通过理解第一视角视频(Robot Learning by Understanding Egocentric Video)
CMU 机器人讲座 —— 构建适应性强的通用机器人
教程:使用 CVXPY 进行凸优化 - SciPy 2022
CMU 最优控制 2024 第 17 讲 迭代学习控制(Iterative Learning Control)
1小时我居然就搞懂了深度强化学习DQN算法及训练!DQN改进与应用技巧,运用神经网络来近似Q值函数,使算法能够在高维状态下运行,深度学习
宾大 GRASP 讲座 —— 机器人中的具身人工智能
USC 2024 机器人基础 第 17 讲 基于采样的运动规划 I
MIT 欠驱动机器人学 2024 第12 讲 轨迹稳定 I
用 ROS 2 在 Isaac Sim 中驾驶自主移动机器人
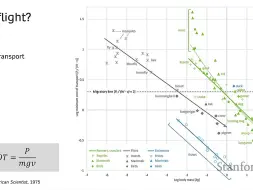
斯坦福机器人讲座 - Flying Robots Exploring Hybrid Locomotion and Physical Interaction
实时最优控制讲座 —— Crocoddyl 教程
CoRL 讲座 - 基于仿真学习的具身智能
开源机器人灵巧手(Jetson Nano)教程
实时最优控制讲座 —— 最优控制机器人软件
CoRL 讲座 —— 用于机器人的预训练模型
MATLAB - Understanding Kalman Filters 官方出品
慕尼黑工大机器人研究 —— 人工神经假肢控制系统
CoRL 机器人讲座 —— 通向通用机器人之路
Isaac ROS Office Hours
2024 斯坦福 凸优化教程 Stephen Boyd 第 6 讲
USC 2024 机器人基础 第 18 讲 基于采样的运动规划 II
CMU 机器人讲座 —— 模仿学习(IRL)与从人类反馈中学习(RLHF)
CoRL 讲座 Russ Tedrake - 从鲁棒控制到基础模型,对鲁棒性的看法多种多样
特斯拉 Optimus Gen 2 在日常生活中的应用
基于 ROS2 仿真的入门者开发实践
CMU 最优控制 2024 第 9 讲 凸 MPC
意大利 IIT 研究 —— iCub3 阿凡达系统可实现仿人机器人的远程完全沉浸式化身
实时最优控制讲座 —— OCS2 教程
MIT 机器人讲座 —— Learning Abstractions from Humans
为什么使用 C++ 编写机器人程序?
这机器人看起来有点瘆人嘞
斯坦福大学研究 - 用于机械手设计的动力学扩散模型
RoMI Lab 研究 —— 通过全身 MPC 和最优区域选择实现感知运动
深度无监督学习 UC 伯克利 第 4 讲 潜变量模型与变分自编码器
ROS2 Actions [1H Crash Course]
CMU 机器人讲座 —— Where's RobotGPT
实时最优控制讲座 —— TrajectoryOptimization.jl 教程