V
主页
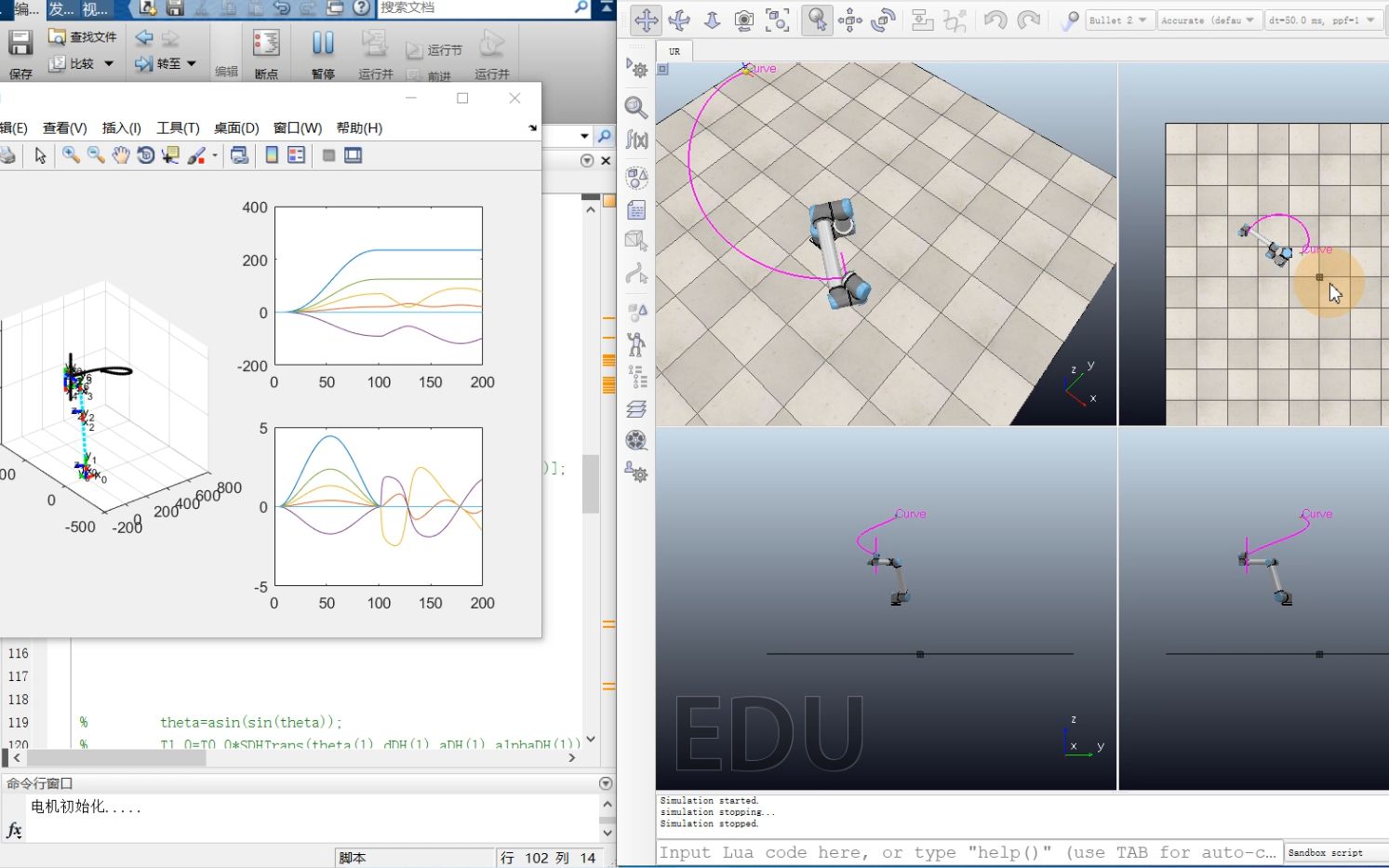
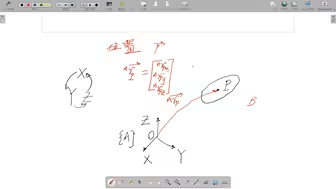
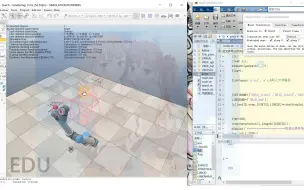
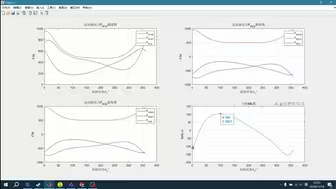
机械臂轨迹规划matlab、Vrep联合仿真
发布人
(1)由matlab 进行关节角度解算,Vrep进行关节角度接收和运动仿真; (2)机械臂运动轨迹包括圆、直线,首先在某处规划直线或圆弧,由于机器人初始位姿与规划轨迹的位姿起点存在差异,这之间采用多项式拟合的方式,对关节空间进行点到点的轨迹规划; (3)matlab 绘图包括机械臂的运动轨迹、各关节的速度、位置随时间的变化; (4)matlab和Vrep独立,matlab可独立完成仿真; (5)解析法计算关节角度; (6)博客:https://blog.csdn.net/qq_37469992
打开封面
下载高清视频
观看高清视频
视频下载器
五次&三次多项式连续轨迹规划
四足机器人步态仿真
无人机与小车的协同轨迹跟踪控制
基于贝塞尔曲线的六足机器人步态规划
Delta并联机器人门型轨迹规划
基于改进麻雀算法的机器人时间最优轨迹规划——7次非均匀B样条轨迹
基于粒子群/遗传算法的取件机械手轨迹综合优化设计
粒子群轨迹规划
机器人连续位姿同步插值轨迹规划——对数四元数、b样条曲线、c2连续位姿同步规划
机器人多项式拼接轨迹规划的各类形式建模仿真——33333、33533、43334、44445、44545拼接轨迹
样条曲线轨迹规划
[信捷]基于五次多项式的S型凸轮曲线规划,不需要配凸轮表
麦克纳姆轮云台控制仿真
保姆级手把手IsaacLab安装教程
小段曲线速度、姿态连续轨迹规划及运动仿真
机器人学动力学三点
足式机器人步态仿真、单腿、悬空、着地直行、旋转、爬楼梯联合调试
分解控制
VREP基本操作:物体摆正、位姿对齐、简化及装配、图层隐藏
机械臂组装
机器人阻抗控制— 动力学建模、试探抓取目标物、控制周期影响展示
机器人速度前瞻控制算法
力反馈手套在遥操作方案中的应用
一只慵懒的机械臂在抓啊抓啊抓
2.3 机器人学基础-姿态的轴角参数表示法(即等效轴旋转)
2.1 机器人学基础-旋转矩阵
【开源】听懂人话的6轴Agent机械臂
4驱4转全向移动机器人运动控制
【超多模型MPC算法】开源Mujoco-MPC演示
机器人示教仿真
「精校熟肉」Optimal Control-最优控制 (CMU 16-745) 2024-L13-处理三维旋转问题
2.2 机器人学基础-用欧拉角表示旋转矩阵
具身智能机械臂实操入门课程-02:相机选型、接线与代码调试
基于matlab合solidworks的曲柄连杆运动学、力学分析
还是齿轮减速靠谱,机械臂写3毫米汉字
手搓机械臂
Dummy2 机械臂全新升级谐波无刷电机版 全新开源力控 可跟换夹头 夹爪来了😄
《ROS 2机器人开发从入门到实践》7.2.1构建第一章导航地图
11月新品上线 | 随从臂“眼在手上”整机版本&夹爪摄像头组件重磅推出!
基于STM32单片机蓝牙智能机械臂挖掘机控制小车