V
主页
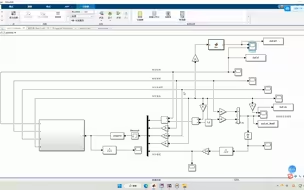
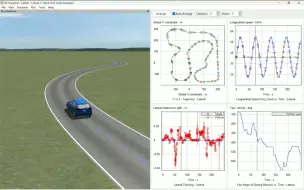
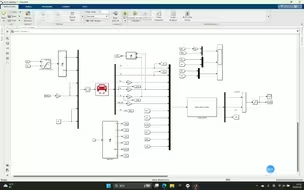
自动驾驶算法—横纵向综合控制—复现老王
发布人
来自忠厚老实的老王,第十二讲横纵向综合控制,复现
打开封面
下载高清视频
观看高清视频
视频下载器
车辆仿真与建模(一)基于 Simulink 车辆纵向动力学模型的整车控制器能量管理策略开发
【基础】自动驾驶控制算法第十一讲 纵向双pid控制
你还在用PID?MPC模型预测控制,从公式到代码!
无人驾驶控制算法-基于MPC的分层弯道自适应巡航
Carsim横向纵向控制
无人驾驶控制算法-MPC-横纵向耦合控制
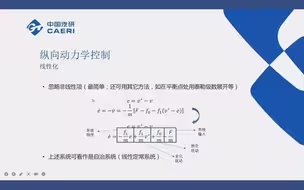
纵向动力学控制——汽车动力学控制
最优化-迭代LQR(ILQR)与微分动态规划(DDP)
改编老王(决策规划)--控制用的mpc,另外可以实现超车
模拟纵向和横向车辆动力学matlab
自动驾驶算法-决策规划-参考线模块错误整理
第8节_基于车辆动力学模型的LQR路径跟踪算法
自动驾驶横纵向综合控制
无人驾驶规控算法-动态避障
无人驾驶控制算法-Nmpc-双移线轨迹跟踪
基于动力学模型的模型预测控制(MPC)轨迹跟踪算法Carsim和simulink联合仿真实现
无人驾驶控制算法-LQR轨迹跟踪
规划控制联合仿真横向(MPC/LQR纵向PID+动态规划与二次规划)
Simulink和CarSim中实现纵横向控制(纵向:定速20km/h,横向:纯追踪算法)
无人驾驶规划算法-速度规划-ST图-DP-QP验证
无人驾驶控制算法-车道保持-MPC
自动驾驶控制算法:Carsim和Simulink联合仿真实现LQR最优控制轨迹跟踪策略(多种复杂道路均可)
无人驾驶控制算法-ACC-直道
ROS-C++横纵向解耦MPC轨迹跟踪控制
自动驾驶控制-基于车辆运动学模型的LQR路径跟踪
【纵向控制】上层MPC+下层油门刹车表实现纵向控制
无人驾驶控制算法-横向mpc+纵向mpc
【基础】自动驾驶控制算法第二讲 三个坐标系与运动学方程
【基础】自动驾驶控制算法第八讲(二) 简单的软件操作
【基础】自动驾驶控制算法第八讲(一)横向控制算法与流程图
【基础】自动驾驶控制算法第九讲 纵向控制开篇
史上最糟糕的无人车模型预测控制(MPC算法)轨迹跟踪控制入门必学爆品课程(精简版)
【基础】自动驾驶控制算法第四讲 坐标变换与横向误差微分方程
使用不同控制算法(LQR、滑模控制器、积分器反步控制器)的姿态确定和控制系统仿真matlab simulink
无人驾驶规划算法-DWA
【基础】自动驾驶控制算法第三讲 轮胎侧偏与车辆动力学方程
【基础】自动驾驶控制算法第八讲(三) 代码与模型
【基础】自动驾驶控制算法第十二讲 横纵向综合控制(完结)
动态规划算法-混合动力汽车的全局优化能量管理策略
UP书本第五章--横向偏差PID轨迹跟踪控制器