V
主页
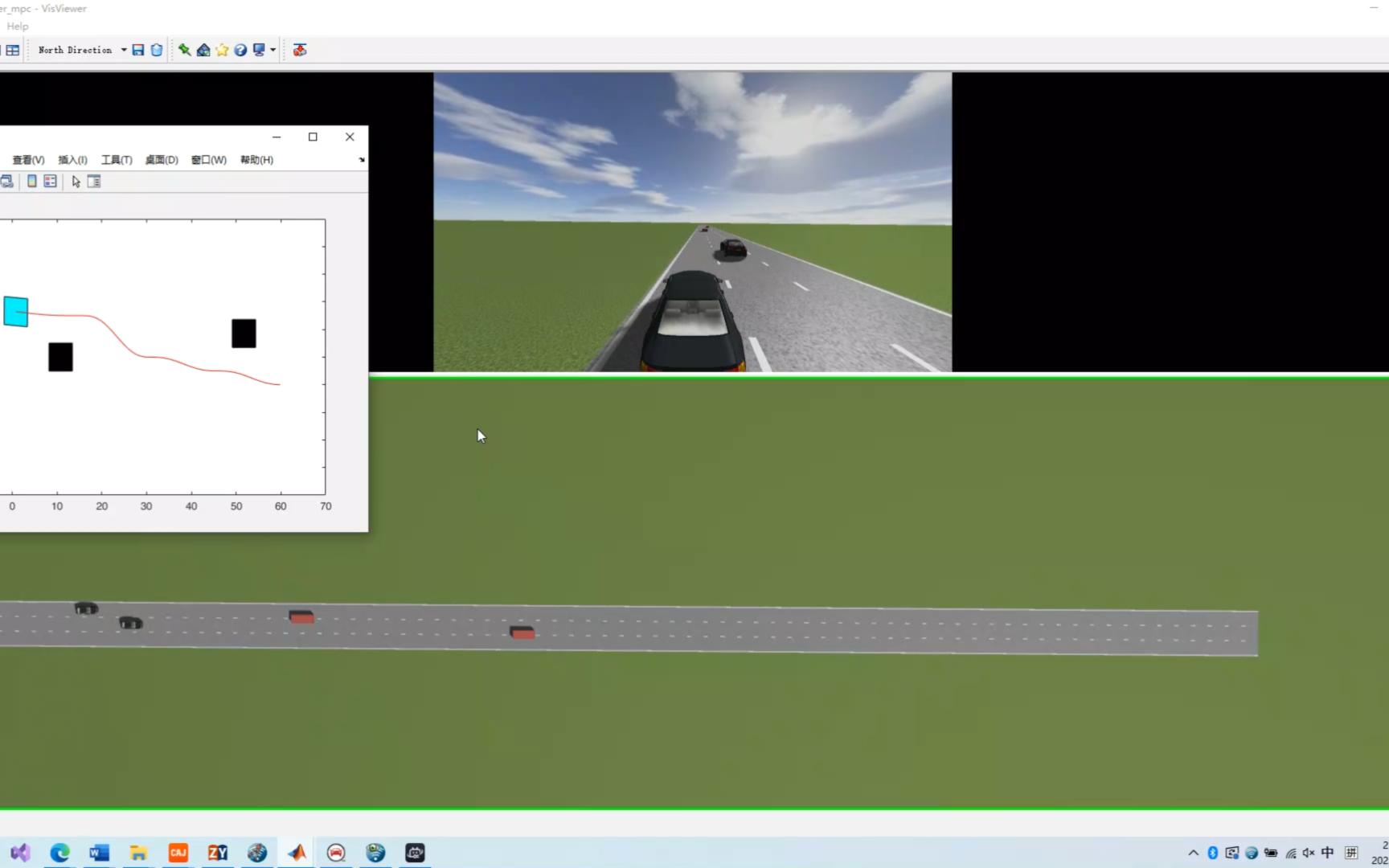
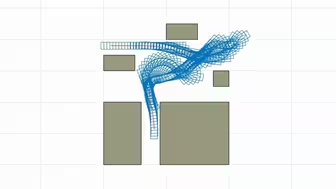
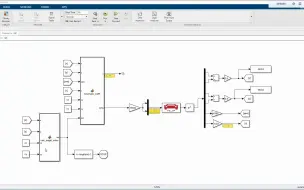
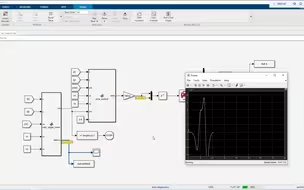
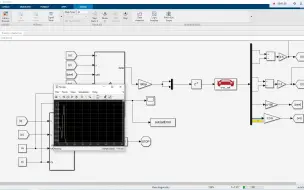
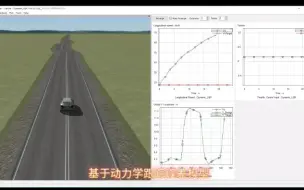
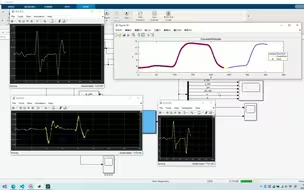
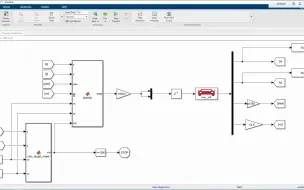
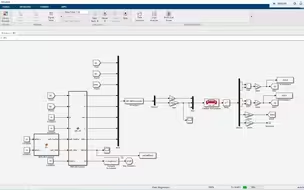
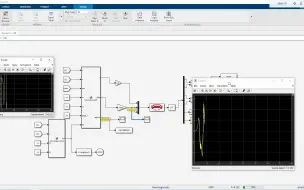
改编老王(决策规划)--控制用的mpc,另外可以实现超车
发布人
改编老王,控制部分用的mpc,规划可以避动态障碍物。@忠厚老实的老王
打开封面
下载高清视频
观看高清视频
视频下载器
自动驾驶控制-二自由度横摆动力学模型MPC跟踪任意路径
自动驾驶控制-基于车辆运动学模型的MPC路径跟踪
自动驾驶路径跟踪-纯跟踪和MPC算法的C++实现
自动驾驶控制-动力学跟踪误差模型MPC路径跟踪
半挂车混合A*路径规划大法
自动驾驶控制-stanely路径跟踪仿真
自动驾驶控制-运动学模型MPC跟踪圆形轨迹
自动驾驶控制-非线性Nmpc跟踪双移线路径
自动驾驶控制-单点预瞄PID路径跟踪
自动驾驶控制-基于车辆运动学模型的LQR路径跟踪
自动驾驶控制-纯跟踪路径跟踪仿真
自动驾驶控制-纵向MPC横向LQR轨迹跟踪
纯跟踪算法跟踪双移线路径
Stanely算法跟踪双移线路径
汽车运动学与动力学系列-车辆运动学模型验证
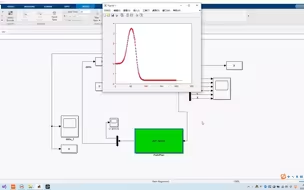
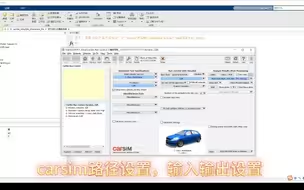
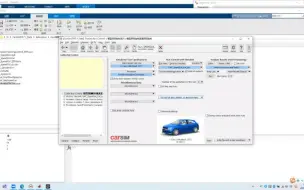
simulink与carsim 自动驾驶路径跟踪
汽车运动学与动力学系列-二自由度车辆动力学模型验证
基于Nmpc的自动驾驶路径规划与MPC的路径跟踪
自动驾驶控制-三自由度动力学模型mpc跟踪自定义路径
路径跟踪Stanely算法仿真
自动驾驶控制-动力学跟踪误差模型LQR路径跟踪
半挂车泊车算法
基于运动学模型的MPC跟踪双移线路径
自动驾驶控制-横向mpc纵向双pid轨迹跟踪
matlab与carsim联合纯跟踪路径跟踪算法仿真
【假期复健】study with me /没有天赋那就不断重复ฅ(*`ω´*)ฅ
我发现科研能力强的博士生都翻过了三座大山
如何成为科研大佬?(人际关系篇)
汽车运动学与动力学系列-魔术轮胎模型验证
基于运动学模型LQR跟踪双移线路径
自动驾驶控制-基于mpc的速度跟踪控制
汽车运动学与动力学系列-带遗忘因子的递推最小二乘法轮胎线性侧偏刚度估计
你在读博士期间明白的最深刻的道理是什么?
研0的时候要是有人能告诉我这些就好了
科研是一种长期主义生活方式,核心在于:
【学习复健】读病隙碎笔的一天/study with me
很多科研人的苦,都是自己选的
Stateflow教程 08 状态组合 和 创建子图 Group & Subchart
自动驾驶算法学习常用的工具推荐
有限元基础编程 | 平面高阶单元