V
主页
京东 11.11 红包
【第二届全国SLAM技术论坛】SLAM技术的未来发展
发布人
【第二届全国SLAM技术论坛】SLAM技术的未来发展 主持:吴毅红 嘉宾:戴玉超、黄国权、刘勇、沈邵劼、王程、查红彬
打开封面
下载高清视频
观看高清视频
视频下载器
第三届SLAM暑期学校
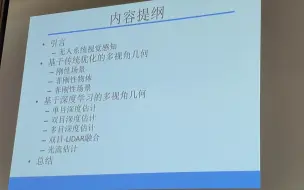
【第二届全国SLAM技术论坛】戴玉超-基于深度学习的多角度几何:从监督学习到无监督学习
【百度自动驾驶技术系列课程】自动驾驶核心模块精讲
【SLAM】高翔-视觉SLAM十四讲 配套视频
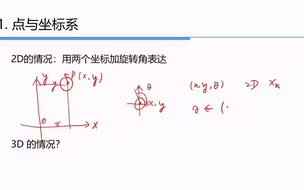
2-1 点与坐标系
SLAM技术论坛分享
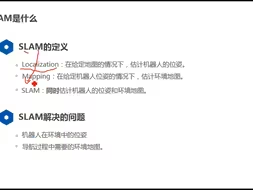
1-3 视觉SLAM的数学描述
【顾险峰】【中英字幕】计算共形几何系列课程
有缘人见(下)
【百度自动驾驶技术系列课程】自动驾驶硬件系统及开发平台介绍
视觉惯导融合SLAM内外参标定是关键
LaTeX从入门到放弃
PPT从入门到放弃
有缘人见(上)
高翔-大规模点云地图的自动化构建
冒死上传!花了三千买的刘媛媛顶级费曼学习法,学习一小时胜过十小时,世界公认最好的学习方法!费曼学习法 | 高效背书 学霸推荐的最有效方法 提高学习效率
3-1 群
【ICRA2021】3475-OV2SLAM:用于实时应用的完全在线和通用的视觉SLAM
多传感器融合SLAM松耦合与紧耦合
为什么需要多传感器融合
SLAM-无人驾驶、VR/AR
工作能力强的都擅长结构化汇报,汇报、演讲、沟通全搞定!
1-1课程内容与预备知识
【华南农业大学】激光视觉惯性SLAM建图 - 农业工程楼
SLAM为什么需要闭环检测
第154讲 如何整理并归档资源
2021年模式识别高峰论坛
天-空-地协同的露天矿边坡智能监测技术及典型应用
有缘人见
全165集【零基础自然拼读完美发音】2024最新版.自然拼读完美发音课程
SLAM为什么需要IMU
轮式里程计激光里程计视觉里程计区别是什么
【ICRA2021】VOLDOR+SLAM:当基于功能或直接的方法还不够好的时候
【TED演讲】成长的意义,就是寻找自己
学习好的千万不要进!如何让学习像游戏一样上瘾!学习效率暴涨300%,学习一小时胜过十小时,世界公认最好的学习方法!费曼学习法|高效背书 学霸推荐的最有效方法
第159讲 如何打破学习资源的信息差
【公开课】《博弈论》北京大学 精品公开课
1-4 Linux下的C++基础
港科技最新SLAM数据集!SLABIM:香港科技大学主楼SLAM-BIM耦合数据集