V
主页
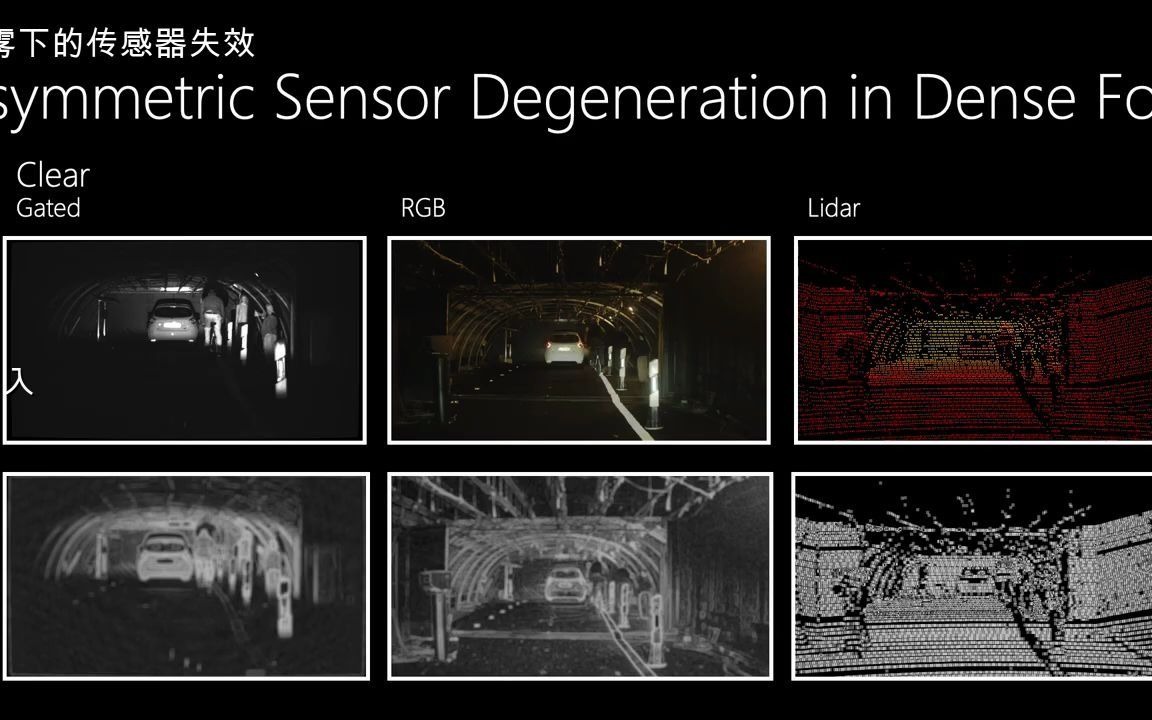
在雾霾等不利天气下相机、毫米波雷达传感器深度融合自动驾驶(CVPR2020)
发布人
https://www.youtube.com/watch?v=HPT4nsCkT5Q 目标检测是自动驾驶车辆中基本的计算机视觉问题。现有的训练数据集偏向晴朗的天气,而恶劣天气下的数据非常罕见,而恶劣天气下传感器会产生非对称的失真,因此现有的方法不适用于恶劣天气场景。本文提出了一种自适应单次深度融合架构,并引入新型多模式数据集来解决现有数据集中的天气偏差,使该方法可以在晴朗天气的数据上进行训练,并将传感器不对称损坏的情况稳健地推广到恶劣天气的情况。
打开封面
下载高清视频
观看高清视频
视频下载器
自动驾驶中常用传感器硬件介绍
爱丁堡大学!雨雪无阻|毫米波成像雷达赋予具身智能鲁棒的空间感知(上篇)
NVIDIA再斩CVPR冠军方案!Hydra-MDP:突破端到端多模态自动驾驶!
02 自动驾驶中常用传感器硬件介绍(Camera + LiDAR + Radar + IMU)(上篇)
大模型时代下的端到端自动驾驶(上篇)
最新CVPR2020论文:用AI还原3D照片(Facebook研究,效果惊艳,代码开源!)
香港科技大学!CVPR&NeurIPS2024开源 | 迈向通用可泛化的自动驾驶世界模型(上篇)
极快跟踪一切!DOT:无惧遮挡!
Nature正刊开源!突破低延迟自动驾驶视觉感知!
这绝对是质量最高的单目深度估计开源方案!
【数学视角下的Transformer】不愧是MIT数学系的Philippe Rigollett——自注意力机制、深度神经网络、CV+NLP
比刷剧还爽!学完这50套【机器学习+深度学习+计算机视觉+自然语言处理】实战项目!你的毕业设计基本就不用慌了!(AI人工智能丨CV丨NLP丨数据分析)
CVPR2023:不使用任何3D数据标签,零样本学习3D场景理解
04 自动驾驶中多传感器信息融合理论(上篇)(Camera + LiDAR + Radar + IMU)(二)
06 自动驾驶中实战基础之3D-2D求解方法(PnP系列)[Camera + LiDAR + Radar + IMU]
【PyTorch】只看不练,等于白看!!PyTorch深度学习实战案例,还不拿下!!!
为什么大学计算机全是深度学习?
研究生如何快速找到并复现论文代码?用20分钟手把手带你!看完包会的!!--人工智能/深度学习/神经网络
GNSS、IMU、Lidar多传感器因子图融合定位效果展示
【全463集】入门到精通,一口气学完线性回归、逻辑回归、梯度下降、SVM支持向量机、随机森林、决策树、贝叶斯、聚类算法、朴树贝叶斯、神经网络等十二大机器学习算法
苏黎世联邦理工:利用事件相机进行单目稠密深度估计
北交博士主讲:深度学习驱动下的相机标定技术发展(上篇)
狂发一区的YOLO,和Mamba是绝配!最新研究命中Nature,这泼天的高分思路你要不要!
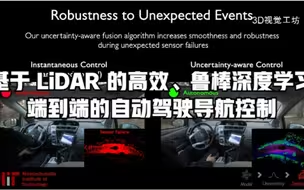
ICRA2021,基于 LiDAR 的高效、鲁棒深度学习端到端的自动驾驶导航控制,大幅减少接管次数(代码开源)
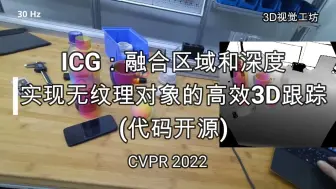
[CVPR2022] ICG:融合区域和深度以实现无纹理对象的高效3D跟踪
SCIROBOT2023 港大开源一种用于自主导航的具有扩展传感器视场的自旋转单驱动无人机!
强推!不愧是公认的最好的【MATLAB教程】机器学习算法六大神经网络课程清华大佬12小时带你从入门到进阶(机器学习/深度学习/神经网络/人工智能/计算机视觉)
【真的随便毕业的!】深度学习论文掌握这个创新方法,哪怕研二换课题都能来得及!适合几乎所有搞深度学习神经网络的同学
香港大学工作!CVPR2022:事件相机的自动对焦
卷积到底卷了啥?复旦大佬带你三小时快速上手【卷积神经网络】入门及实战,全程大白话讲解比刷剧还爽!
自动驾驶中的视觉感知技术
自动驾驶实战课之多相机间的同步实战
最新英伟达自动驾驶测试demo,包含距离感知、交通标志检测、运动估计、多相机特征跟踪、以及停车位检测等多项功能
复杂驾驶中的人机交互!LMDrive:第一个基于LLM的闭环端到端自动驾驶!
广汽冯兴亚谈传统车企出卖灵魂论:自动驾驶技术现在已不是灵魂
直接抄她的代码,就是最好的学习方法!!
直接带你把Transformer手搓一遍,这次总能学会Transformer了吧!
ICRA2024 牛津提出NeRF融合激光雷达SLAM的大场景重建
[CVPR2022] 使用单幅彩色点投影的深度学习高光谱和深度重建
GNN+Transformer到底有多强?迪哥精讲迪哥精讲图神经网络融合transformer,绝对是今年的研究热点!