V
主页
自动驾驶实战课之多相机间的同步实战
发布人
如题。
打开封面
下载高清视频
观看高清视频
视频下载器
Occupancy Networks后处理
Transformer模型结构
Occupancy占用网络的多维应用探究
绪论|单目相机标定理论及张正友标定法(上篇)
高速结构光三维面形测量方法
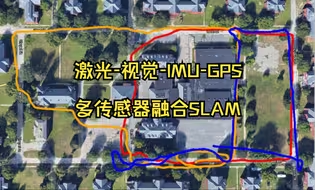
自动驾驶中实战课之Lidar与IMU的同步实战
LVI-SAM代码实战与评估
深度相机概述
自驾场景 快速训练!CarDreamer:首个开源世界模型自动驾驶平台
极快跟踪一切!DOT:无惧遮挡!
如何学习NeRF/3DGS-SLAM?(公开课直播回放)
国内首个面向具身智能方向的理论与实战系统课程
LVI-SAM|视觉-惯性子系统(VIS)代码精读
双目相机标定基础及标定实战
自动驾驶中实战课之Camera与IMU的融合实战
基于单张图片的3D人脸重建概述
BEV&Occ提升颗粒度的方案
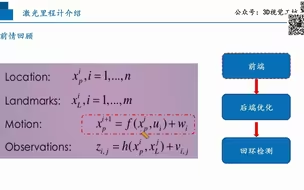
激光里程计精讲(上)
Open3D-三维数据结构
无需额外训练!SAMPro3D:零样本3D分割一切!
【奇门遁甲】从0基础入门到进阶实战课程(15集全)
自动驾驶中的深度学习模型部署实战-CUDA编程之内存访问、CUDA异步并行执行
四旋翼无人机-TD跟踪微分器原理与仿真
斯坦福团队EquiBot:仅用 5 分钟演示,机器人就能学会日常操作
无人机-PID算法详解与实战
3D线激光相机检测技术解析与应用分享
自动驾驶中的深度学习模型部署实战-数据预处理NPP库介绍及CUDA编程模型之线程操作
四元数基础
无所不能!OASim基于3D GS的自动驾驶开源和自适应模拟器!
无需标定板,高分辨率LiDAR和相机的像素级外部自标定,代码开源
单目深度估计-动态物体处理方法
公开课|基于PX4的四旋翼建模与控制
三维点云系列视频——第一章绪论
这绝对是质量最高的单目深度估计开源方案!
Power:自动驾驶中鸟瞰视图下端到端实例预测
[非完整版]透彻剖析室内外激光SLAM算法与实战系列课程-激光SLAM后端优化方法
大森林-所有指标全面领先!图像-点云配准最新SOTA!CoFiI2P详细介绍!
停车不再难,考验小鹏mona智能泊车的时候到了
CVPR'24 Symphonies:基于实例级建模的3D场景占用
无人机|PID算法详解与实战(上)