V
主页
机器人运动控制简明教程 第一节 位姿
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
机器人建模和控制
机器人学:建模、控制与视觉——华中科技大学
机器人学 机器人技术 期末复习(涵盖机器人运动学和机器人动力学部分)
机器人运动控制简明教程 第六节 机器人控制技术简介
【机械臂运动学教程】机械臂+旋转矩阵+变换矩阵+DH+逆解+轨迹规划+机器人+教程
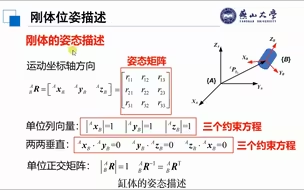
机器人学 | 2.1 机械臂的位姿描述(重点为旋转矩阵)
十分钟掌握机器人运动学|理论和仿真讲解|源码公开
【第1部分】机器人运动学
机器人运动控制简明教程 第三节 雅可比矩阵
机器人运动控制简明教程 第二节 DH参数与机器人运动学
硬核手搓,全程开源。具身人形机器人第二期,本次视频更新也附带了我们现阶段所有的流程开源
【机器人理论最好中文入门课程 没有之一】 机械臂 系统 结构 旋转矩阵 变换矩阵 DH模型 运动学正逆解 轨迹规划 动力学 控制 遥控操作 教程
机器人DH法、运动学、雅克比(Jacobian)矩阵
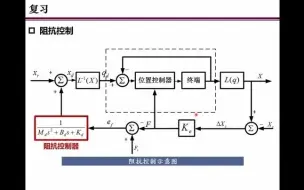
机器人运动控制简明教程 第七节 位置控制与柔顺控制
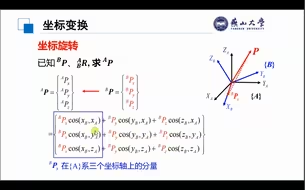
机器人学 l 2.2 坐标变换
机器人学:建模、控制与视觉 第十七次课:机器人的力控制(下)
台大机器人学之运动学——林沛群(含课件+书籍)
现代控制理论—概述
机器人运动控制简明教程 第五节 惯性张量与牛顿欧拉方程
机器人控制前言,不要再花时间调参数了,理论结合实践才能出产品
计算机控制系统简明教程 第五节 直接设计法(1) 最少拍系统设计
机器人控制技术知识点总结(上)~燕山大学第一届笔试敢死队
机器人运动控制简明教程 第四节 拉格朗日动力学方程
做控制、机器人等算法工程师是怎样一种体验?
计算机控制系统简明教程 第二节 脉冲传递函数
机器人学习中你所需要的就是收缩 | 加州理工学院 控制与动态系统 Chung Soon Jo 教授
机器人控制的实际应用
计算机控制系统简明教程 第一节 信号采样与保持
计算机控制系统简明教程 第八节 状态空间描述
CAN总线入门教程 - 持续更新中
硬核手搓,全程开源。从零到一开发一台机器人
(10)标准DH参数详解+案例分析【1】|《动手学机器人学》
《多传感器融合与非线性滤波》
机器人学期末速成考试不挂科|考研复试速成/期末交个朋友
没有工科经验的人可以复刻稚晖君的Dummy机械臂吗?答案是可以的!(真真真保姆级教程,错过后悔!)
【机器人机构学】DH参数法讲解-基于定义出发
『机器人技术』复习课
计算机控制系统简明教程 第四节 间接设计法
西门子1200/1500PLC的FB-FC块结构化编程实操课程
【自制】无刷电机FOC三环控制--迷你FOC驱动板,驱动+主控+通信+检测全部集成