V
主页
【第1部分】机器人运动学
发布人
学习
打开封面
下载高清视频
观看高清视频
视频下载器
机器人建模和控制
机器人运动学-正运动学
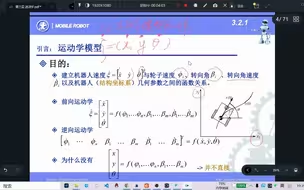
【移动机器人】第三章 运动学(上)
机器人运动控制简明教程 第一节 位姿
机器人学:建模、控制与视觉——华中科技大学
机器人技术基础(1)
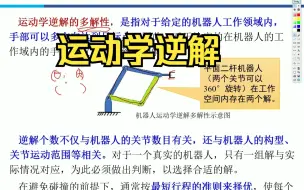
机器人运动学-逆运动学
最好! 最细!最干!的机器人学导论!学完即入门,台湾教授亲自录制!
机器人学之位姿运动学(1)
机器人 运动学 D-H经典方法和改进D-H方法参数表建立
RoboMaster机器人基础 哈尔滨工业大学慕课2019
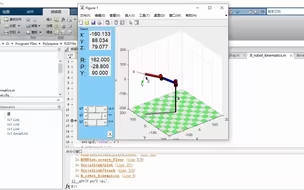
【Matlab机器人工具箱】- 运动学①---建立机器人模型--1、Link类 2、SerialLink类
斯坦福大学公开课——机器人学
机器人学基础:并联机器人运动学与动力学分析
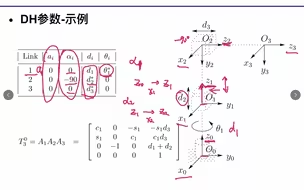
空间机器人技术-建模与控制基础:13.DH参数举例
全网最简单清晰!20分钟硬核拆解人型机器人核心零部件,伺服电机、减速器、空心杯、丝杠一网打尽!机器人专题研究之运动系统【深度报告】
《机器人学》1小时不挂科速成课【小考神】
【第0部分】机器人机构
机器人DH法、运动学、雅克比(Jacobian)矩阵
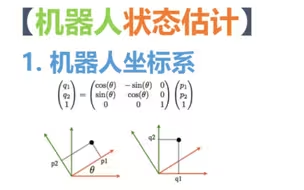
【机器人状态估计】1. 机器人坐标系 变换矩阵 旋转矩阵 世界坐标系 运动坐标系
机器人学之位姿运动学(2)
5. 机械臂运动学逆解
matlab 机器人 运动学 正逆运动学 轨迹规划 出图
【机器人理论最好中文入门课程 没有之一】 机械臂 系统 结构 旋转矩阵 变换矩阵 DH模型 运动学正逆解 轨迹规划 动力学 控制 遥控操作 教程
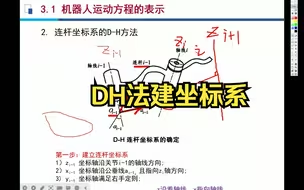
3-3DH法建坐标系
3-11运动学逆解
ABB工业机器人编程基础(基于RobotStudio6.08)(已完结)
机器人学基础20221114
机器人 运动学 D-H方法 坐标轴确定
东南大学 机器人原理及应用(共48讲)
机器人学导论 MOOC
移动机器人的运动学与动力学建模
机器人学 | 2.1 机械臂的位姿描述(重点为旋转矩阵)
工业机器人技术基础(完)
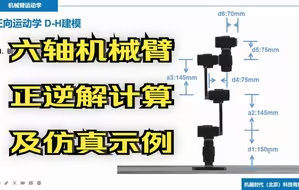
全程干货【六轴机械臂正逆解计算及仿真示例】
机器人学 机器人技术 期末复习(涵盖机器人运动学和机器人动力学部分)
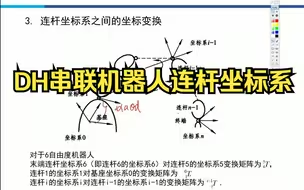
3-8DH串联机器人连杆坐标系
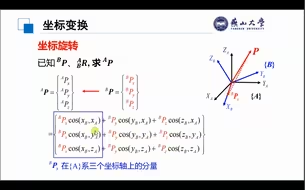
机器人学 l 2.2 坐标变换
【东北大学】机器人基础原理_(房立金教授)
220610机器人学基础期末复习【莆田学院】