V
主页
ROS仿真 移动机器人导航 路径规划 运动控制
发布人
-
打开封面
下载高清视频
观看高清视频
视频下载器
快速流畅!人工智能ROS小车雷达导航、路径规划、虚拟仿真、slam导航算法
重型机器人 自主导航 极限大挑战
多AGV路径规划
路径规划 Dijkstra A* JPS
【已开源】秦通课题组新作入选IROS24!开启实车端到端泊车革命!
北理工成果登央视!实现半机械昆虫飞行控制,成功率可达89%
路径跟踪 | 最优控制LQR算法实现(ROS C++/Python/Matlab)
《5分钟聊控制》电机控制、运动控制、机器人控制三者主要的分野在哪?
【机械臂运动规划】CoppeliaSim与Matlab的联合运动规划仿真
IEEE trans:水下机器人AUV的路径规划和基于模型预测控制MPC的跟踪框架
无人机时间最优路径点飞行(基于序列凸规划)
FR3仿真机+真机MoveIt路径规划 阿凯法奥ROS包(akai-fr-ros)
ROS改进粒子群算法实现机器人路径规划
无人机轨迹规划经典算法ros/c++开源实现
手眼臂合一!亚博智能&大象机器人联手打造,7自由度AI视觉协作机械臂!
强化学习导航:仿真环境训练及ROS实车部署
ROS MoveIt规划场景中添加虚拟墙
(开源)哪吒 MiniROS 机器人结构安装视频(ROS2)
无需SLAM算法,直接生成Gazebo仿真环境对应的高质量真值地图的工具 pgm_map_creator,手把手逐步详细讲解安装部署和使用方法【开源】
铰接式车辆hybrid A*泊车路径规划方法-(3)侧方库位泊入
SLAM算法(浙软夏令营)废柴大学生的所作所为
物理搬运机器人 靶心识别
六自由度机械臂路径规划+运动学正解+标准D-H参数法
《基于ROS2的决策规划算法工程开发》实机演示
离散行业运动控制决赛复盘-完结篇
Unitree 2024 ROS暑期学校课程视频03-人形机器人运动控制分享
全覆盖路径规划算法pro版
2025工创赛重拳出击
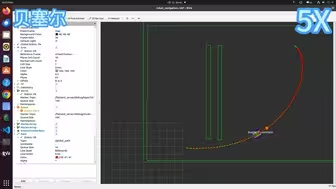
贝塞尔曲线路径规划仿真
机械臂协调控制复现
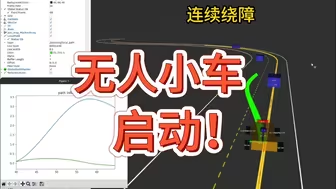
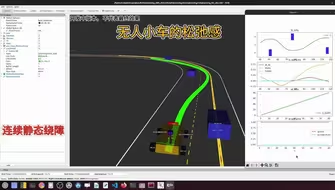
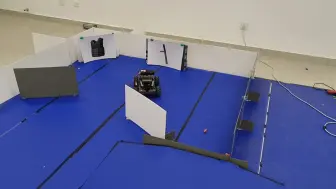
《基于ROS2的决策规划算法工程》动态避障演示 无人小车的松弛感
ROS SLAM小车
Unitree 2024 ROS暑期学校课程视频01-四足机器人Go2开发分享
无人机自主穿环实验(3.5寸飞机首飞成功)
不是自主路径规划不会写 而是写死更有性价比
【告别模糊】机器人专用摄像头,为您的视觉算法保驾护航
最后还是用amcl定位才连续成功导航了三次
半挂车混合A*路径规划大法
在flatland中使用双阿克曼模型进行路径规划与跟踪
s型路径ros2的navigation2 自动导航仿真