V
主页
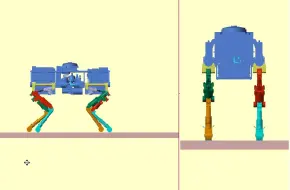
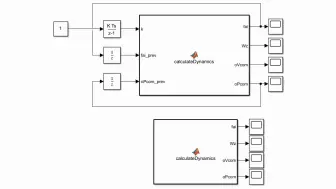
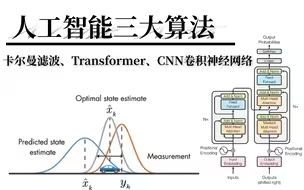
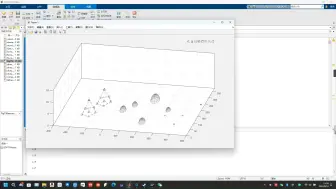
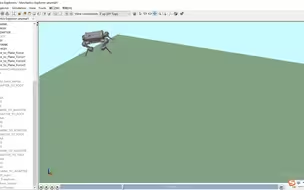
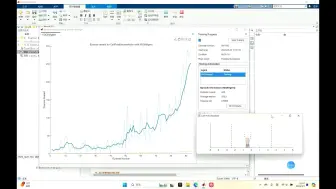
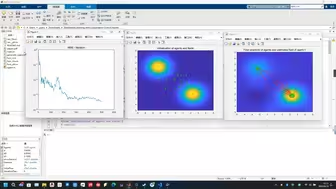
使用离散卡尔曼滤波对四足机器人进行状态估计
发布人
-
打开封面
下载高清视频
观看高清视频
视频下载器
总算是在过年前完成了四足机器人MPC!
四足机器人VMC+状态估计完成!开始下一征程!!!
simulink四足机器人mpc操作记录:地形估计+足端轨迹规划+落足点规划
四足机器人gazebo/simulink联合仿真
simulink四足机器人仿真——人类早期驯服机器狗录像
simulink四足机器人mpc+wbc操作记录:使用两种不同的方式进行质心规划
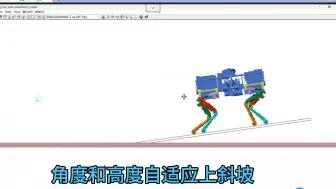
四足机器人MPC爬坡
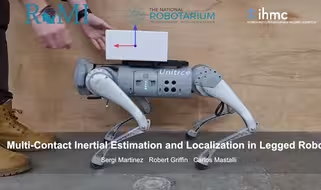
腿式机器人的多接触惯性估计与定位 [论文在审稿中]
Consensus Complementarity Control for Multi-Contact MPC
强化学习训练傻狗自杀式奔跑
PACC:使用 MPC 的四足机器人高负载协作搬运被动臂方法
trot步态行走
你见过四轴机器狗吗 | 还挺Q萌 #机器狗DIY
[RA-L 2020] Object Recognition, Contact Simulation, Detection, and Control
【225】模型预测控制 (MPC),避障控制
云深处科技携手昆泰芯微电子打造高性能四足机器人
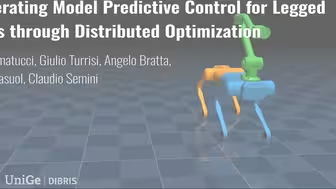
[IROS 2024] 通过分布式优化加速腿式机器人的模型预测控制
[ ICRA 24 ]通过具有子目标预测的分层运动规划实现长远操控
一个过年的时候写的全向跳跃小算法在Cyberdog 1和cheetah进行了验证
RA-L 24浙大最新成果Parkour with Implicit-Explicit Learning Framework for Legged Robots
人形机器人腿部结构 基于 4DoF 球面并联机构
Humanoid Locomotion as Next Token Prediction
路边捡回来的狗子不老实于是调教了一番
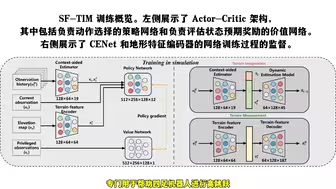
成功部署,敏捷度直接翻倍!浙大提出辅助四足机器人的跳跃新框架SF-TIM,敏捷度直接翻倍
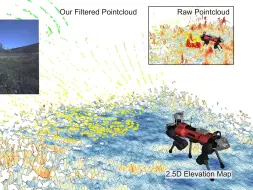
草丛中的环境感知 四足机器人如何感知草丛中的地面情况
2024年最新!【人工智能三大算法】卡尔曼滤波、transformer、CNN卷积神经网络!6小时一次讲清楚!建议收藏!——(人工智能、深度学习、机器学习)
Amesim+Carsim+Simulink联合仿真教程
【229】混乱环境下移动机器人的连续安全控制
【228】【合集】多智能体系统 (Multi-Agent Systems, MASs) 包容编队控制与路径规划
Go2开发教学08-SDK更新及AI运控接口
【机甲出品】12自由度寻 迹四足 机 器 人
会飞的狗子
非结构化环境中腿式机器人的地形相关功率估计
用DQN强化学习训练玩一下倒立摆控制
四足运动:用三种不同的方法在崎岖地形上行走
KAIST猎犬,四足机器人100米世界纪录
【224】多智能体系统 (Multi-Agent Systems, MASs) 的分布式学习与协同控制
火遍油管!大佬告诉你什么是卷积???——20分钟了解卷积
[ IROS 24 ] DIABLO:完全由直接驱动关节组成的 6 自由度轮式双足机器人
PID超大狗制作教程 [更到5集]