V
主页
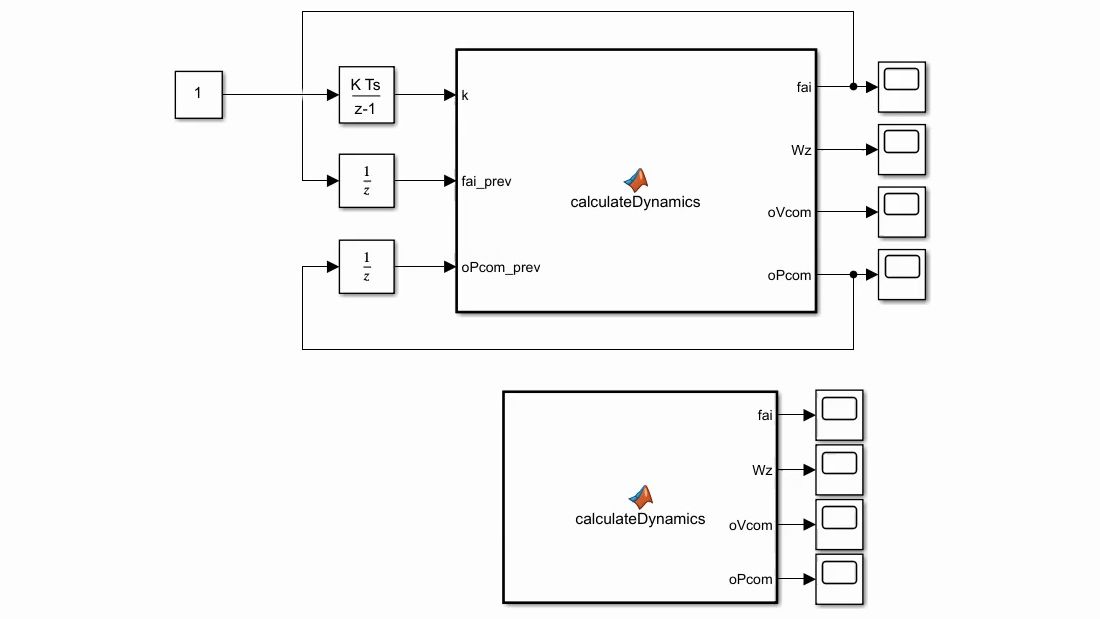
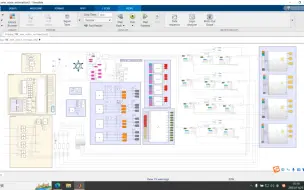
simulink四足机器人mpc+wbc操作记录:使用两种不同的方式进行质心规划
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
simulink四足机器人mpc操作记录:地形估计+足端轨迹规划+落足点规划
总算是在过年前完成了四足机器人MPC!
四足机器人gazebo/simulink联合仿真
四足机器人VMC+状态估计完成!开始下一征程!!!
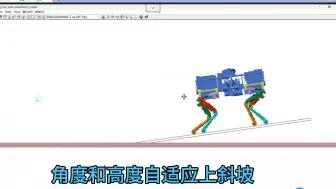
四足机器人MPC爬坡
使用离散卡尔曼滤波对四足机器人进行状态估计
【机甲出品】12自由度寻 迹四足 机 器 人
四足运动:用三种不同的方法在崎岖地形上行走
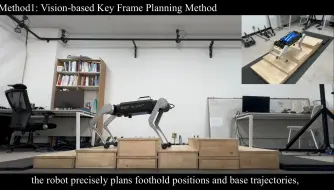
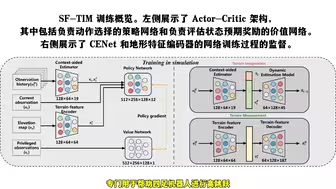
成功部署,敏捷度直接翻倍!浙大提出辅助四足机器人的跳跃新框架SF-TIM,敏捷度直接翻倍
生产力大PK!!!——同时跑四足机器人vmc代码
PACC:使用 MPC 的四足机器人高负载协作搬运被动臂方法
simulink四足机器人仿真——人类早期驯服机器狗录像
Consensus Complementarity Control for Multi-Contact MPC
[IROS 2024] 通过分布式优化加速腿式机器人的模型预测控制
强化学习训练傻狗自杀式奔跑
波士顿动力 MPC 控制策略的演进与思考
mixly随讲二百三十六ESP32四足机器人
豹头犬——四足机器人外观设计
腿式机器人的多接触惯性估计与定位 [论文在审稿中]
机械臂代替尾巴增强机器人的稳定性 四足机器人
KAIST猎犬,四足机器人100米世界纪录
PID超大狗制作教程 [更到5集]
[ ICRA 24 ]通过具有子目标预测的分层运动规划实现长远操控
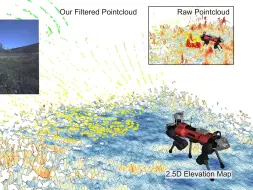
草丛中的环境感知 四足机器人如何感知草丛中的地面情况
你见过四轴机器狗吗 | 还挺Q萌 #机器狗DIY
云深处科技携手昆泰芯微电子打造高性能四足机器人
动态变化环境中单足跳跃者的模型预测跑酷控制 代码地址在简介
【OCS2】进阶Demo也都迁移到ROS2啦
一个过年的时候写的全向跳跃小算法在Cyberdog 1和cheetah进行了验证
trot步态行走
机器狗——四足机器人上楼步态
[ IROS 24 ] DIABLO:完全由直接驱动关节组成的 6 自由度轮式双足机器人
四足机器人,机器狗,冬季远足与KAIST猎犬(完整版)
【中英字幕】波士顿动力公司创始人Marc Raibert WRC2024 问答剪辑
土耳其用户做机器狗和ChatGPT交互 - Robot Dog ChatGPT Integration
Humanoid Locomotion as Next Token Prediction
PiPER:仅售 2,499 美元 AgileX 的下一代轻型机械臂!
人形机器人腿部结构 基于 4DoF 球面并联机构
非结构化环境中腿式机器人的地形相关功率估计
运用SolidWorks绘制的四足机器人